越擎科技
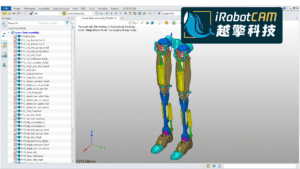
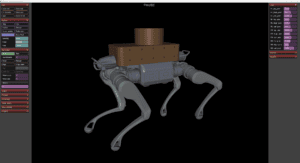
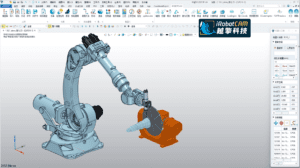
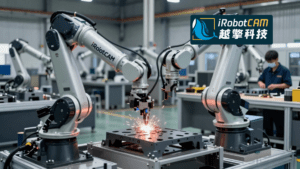
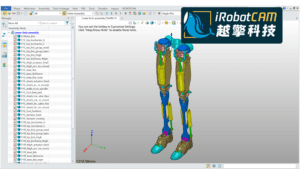
面向具身智能研发与工业机器人自动化,越擎科技致力于打造简单易用的机器人设计与离线编程平台,基于全新CAD架构与机器人运动学引擎,iRobotCAM提供全新的具身智能设计,高精度的离线编程与仿真体验。
iRobotCAM强大的机器人设计与仿真能力,正获得航空,电子,核电等大型央企,广州数控,宝信图灵等机器人公司的认可;在教育领域,iRobotCAM的开放架构及强大的工艺能力,正获得东南大学,浙大大学,南京航空航天大学等大学院校的认同。
iRobotCAM的技术架构的开放性,获得业界越来越多的认可,同时也与业界的领先企业形成越来越多的生态协同,形成各类机器人设计与仿真解决方案,满足具身智能设计,或工业机器人编程解决方案。
iRobotCAM 全周期无忧服务计划,名额有限,先到先得