概要: 工业机器人在各个行业中应用越来越深入,作为国产机器人离线编程软件iRobotCAM的开发商,越擎科技利用CAD架构的优势,专注在高精度的机器人加工领域的突破。对于复杂的机器人雕刻,利用iRobotCAM丰富的轨迹策略,可快速的实现机器人雕刻与变位机的联动。
机器人雕刻的应用不仅仅是在平面类的雕刻上适用,随着工业机器人的成本的降低,以及机器人离线编程软件的发展,如何利用机器人实现复杂的石雕的雕刻是一个行业探索方向。
主要的难点有二,一是利用工业机器人实现石头雕刻涉及到机器人运动学等机器人的应用能力,二是雕刻工件时各种复杂轨迹的生成。
而作为国产机器人离线编程软件的代表,iRobotCAM基于三维CAD的架构优势非常明显,就像利用CAM加工类似,在机器人的轨迹生成策略上非常丰富,由于其在精度上达到0.01mm甚至微米级,比工业机器人的精度至少高一个数量级,高精度的优势在源头上提升了轨迹的可靠性,保障了机器人加工的效果。
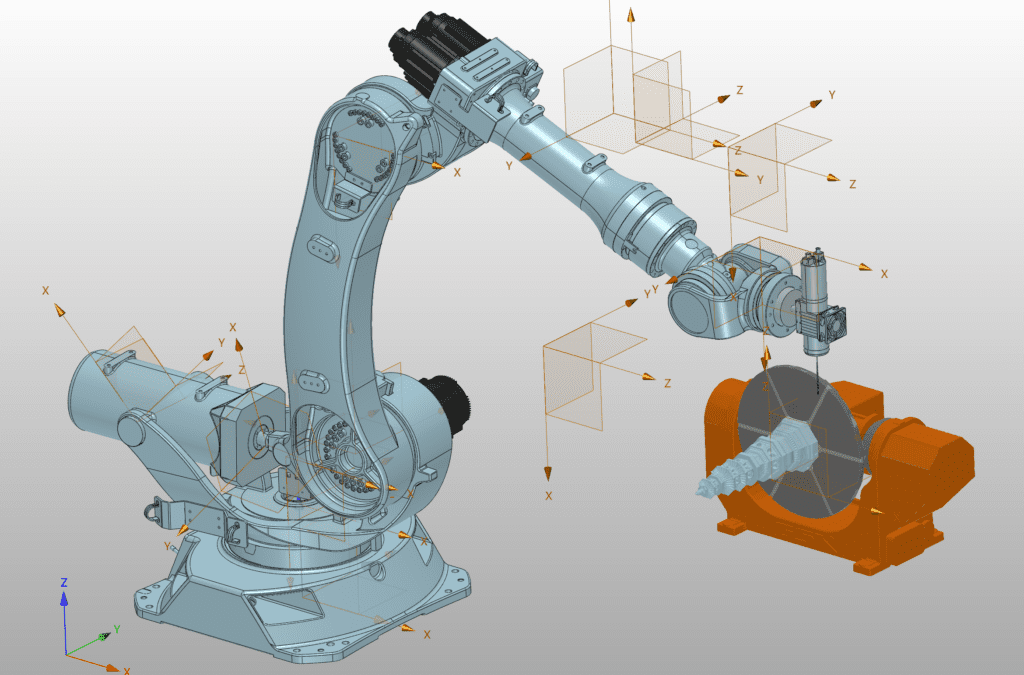
下面我们以iRobotCAM机器人离线编程软件为例, 展示如何雕刻一个复杂的石塔的过程。
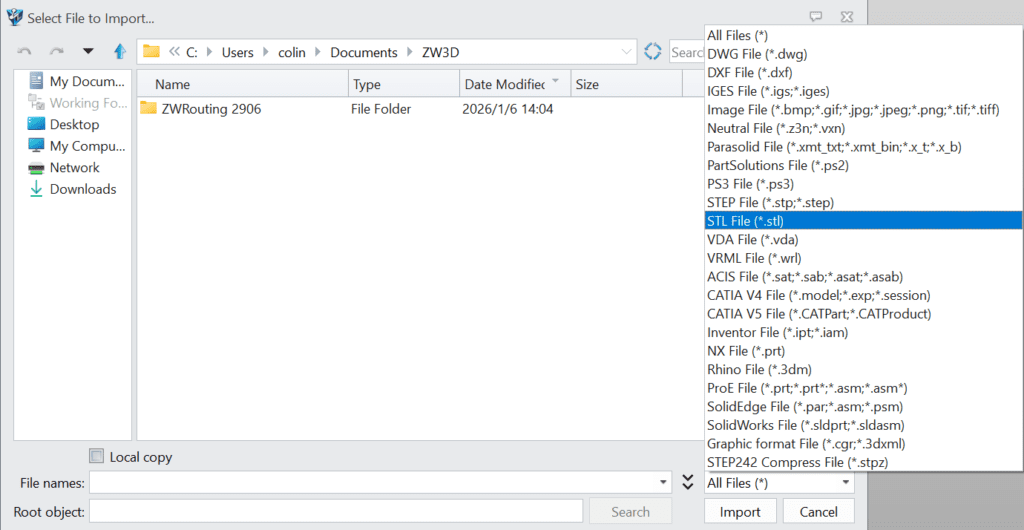
- 利用CAD架构的优势,iRobotCAM跨平台优势明显,基于中望3D平台,可以导入包括solidworks, Catia, NX, Creo, Inventor,step, ACIS等各类文件格式,将工件,变位机等三维文件导入,建立好三维模型的数字化环境。
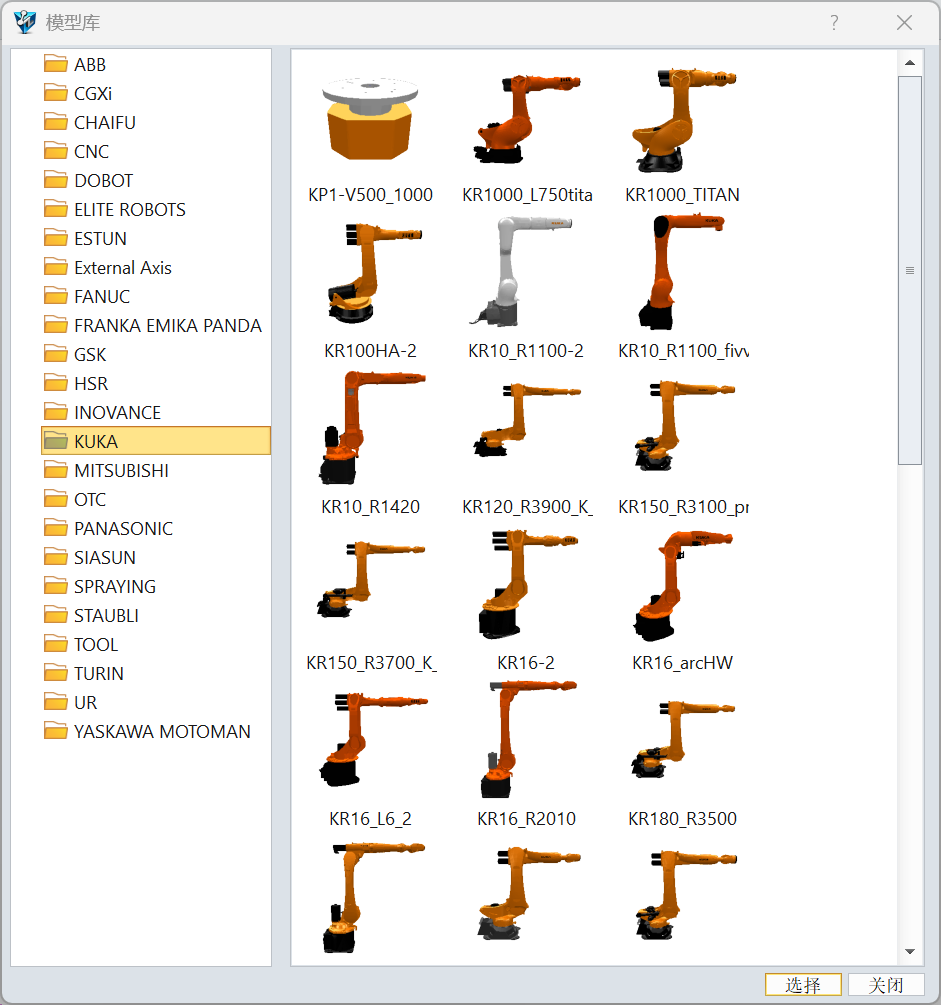
2. 利用iRobotCAM的机器人库,可以快速的调用上百个机器人图库,同时,可以智能的增加自定义的各类特种机器人。
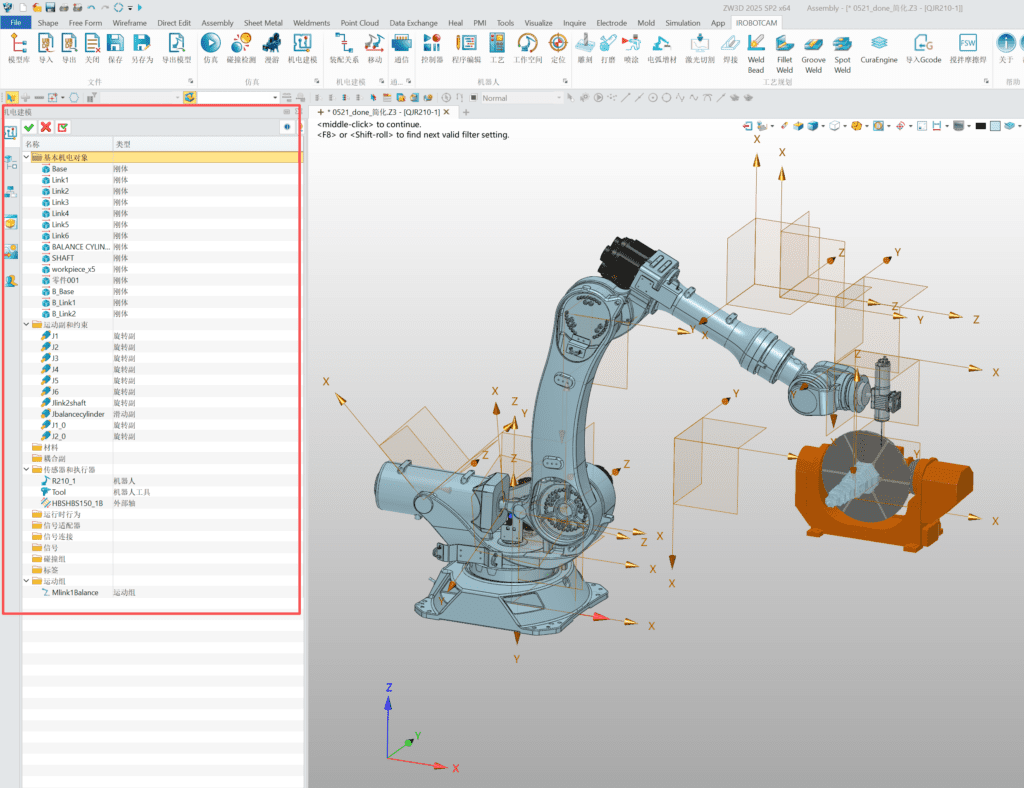
3. 利用iRobotCAM的机电模块,可以实现刚体的创建,碰撞体的定义,运动组的创建,关节的定义等,建立机器人的机电模型,以便实现机器人的碰撞分析,仿真等。
4. 利用iRobotCAM的丰富的机器人轨迹处理算法,可以生成各类复杂的五轴加工轨迹,基于 CAM架构的优势,轨迹的精度高达0.01m,以及微米级的精度,在数据源头上实现高精度的保障,进一步保障机器工的加工效果。
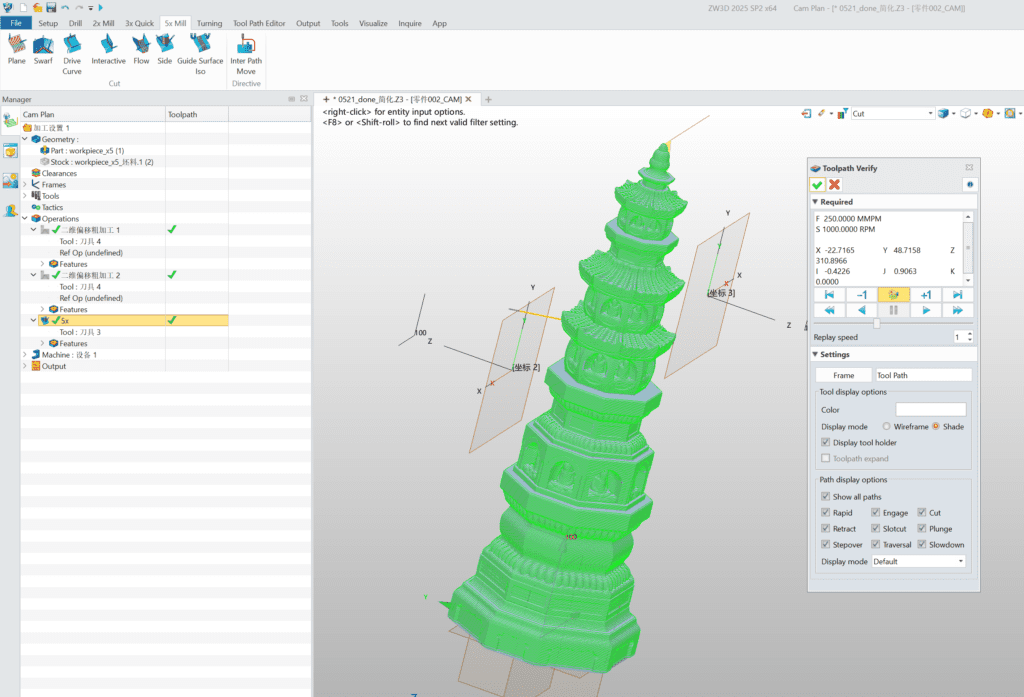
5. 通过iRobotCAM将CAM轨迹转换为iRobotCAM机器人轨迹,进一步利用iRobotCAM的机器人仿真功能,可以直观的查看机器人轨迹运行,检测碰撞等,快捷的导出后置处理程序,满足各类机器人的雕刻。
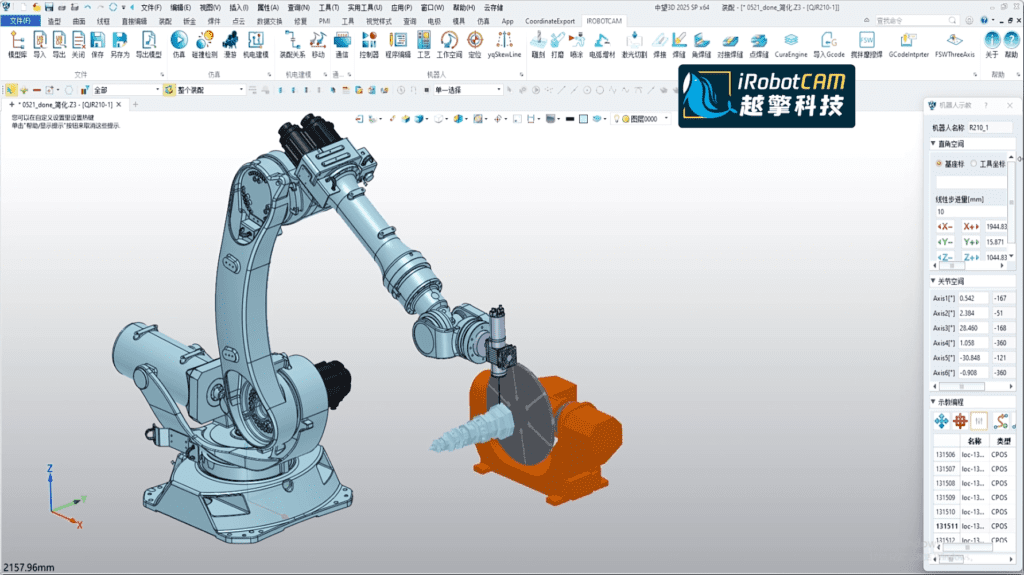
下面以一个复杂石塔为例,iRobotCAM利用CAD架构的5轴轨迹算法,实现了雕像的轨迹的生成,同时利用iRobotCAM在机器人运动及仿真等优势,实现了机器人雕刻应用。
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计与仿真平台,是具身智能设计,机电设计,离线编程,虚拟调试的一体化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


