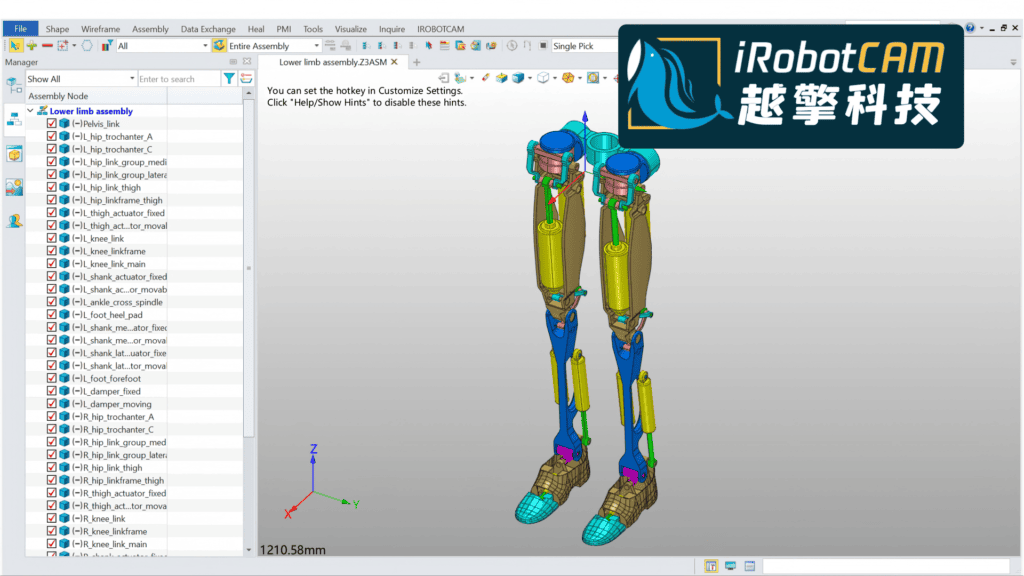
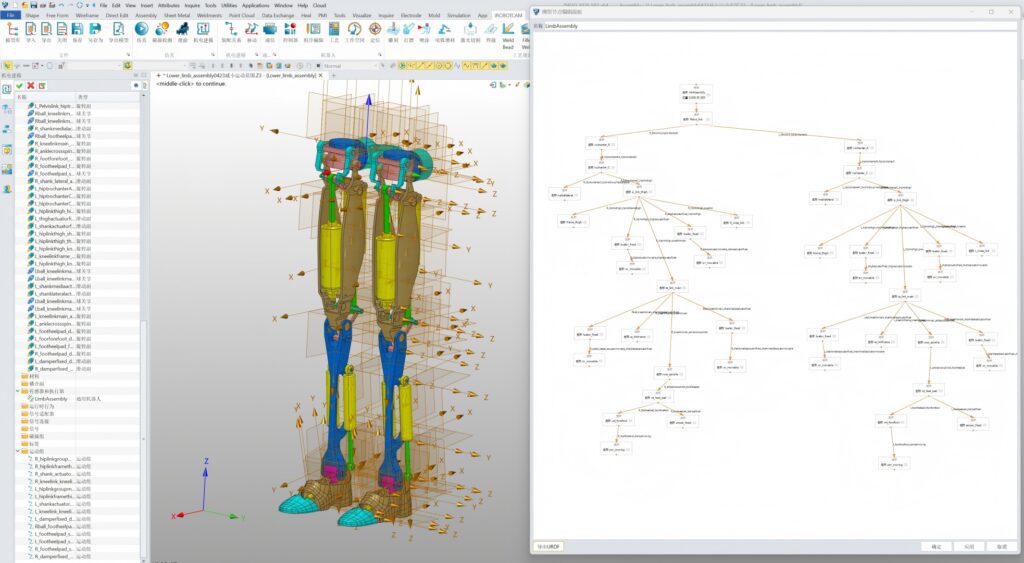
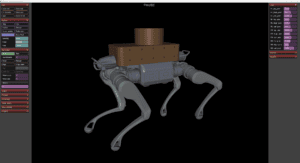
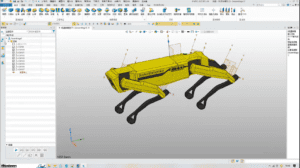
应用案例 波士顿四足机器狗的设计与仿真,具身智能设计软件iRobotCAM轻松完成 目前开源社区上,有包括灵犀机器人等人形机器人为代表的模型,也有波士顿为代表的四足机器人等,我们以开源社区的波士顿的四足机器狗为例,一步步的简要阐述如何实现机器人的设计与仿真。 Read More »