叶片的设计与加工根据不同的应用场景需要做特定的场景的适配,小到风扇的叶片,大到航空叶片,根据工业品的应用场景的不同,设计要素各不相同,有的要求美观为主,有些要求静音为主,有些要求性能为主,而叶片最后是否满足需求,则涉及不同行业的需求,以及不同工艺方法的要求,最核心的莫过于精度的控制,只有精度得到有效控制,才有办法满足不同场景的需求。
我们以叶片的机器人激光熔覆加工为例,选择以基于CAD架构开发的iRobotCAM机器人离线编程软件,利用其CAD架构优势,我们可实现0.01mm级别,以及微米级的高精度编程,从而更灵活地实现激光熔覆加工。
基于机器人的设备的使用场景看,要实现叶片的加工,都需要变位机的参与,才能实现联动的机器人加工,有两种典型的场景,
1.工业机器人+单旋转变位机:由于只有一个旋转轴,除了对于叶片的编程有所要求外,要与单轴变位机形成联动的同时,实现高精度的轨迹,保证叶片的加工精度。

2.工业机器人+双轴变位机:由于有双轴的变位机的支持,在编程的灵活性上更高,可以实现更高的编程效率与加工效率的同时,进一步保障叶片的加工精度。

从效率上看,双轴变位机在效率和编程灵活度上肯定更高,但显然,硬件不可能一换了事,我们基于这两种模式,如何利用iRobotCAM来实现相应的编程与仿真呢?
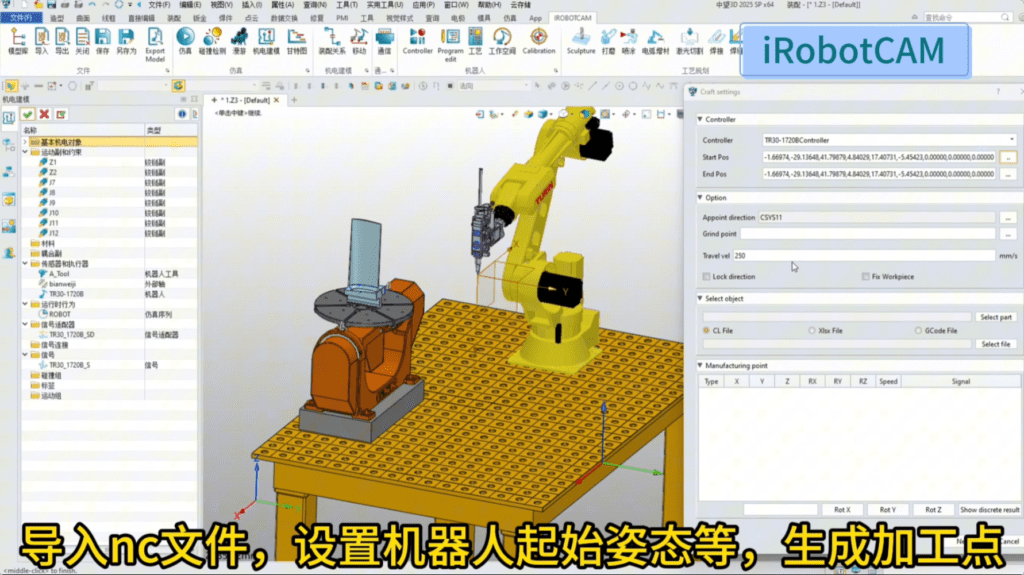
我们先看一下iRobotCAM的基本流程,与iRobotCAM的的喷涂,焊接,激光切割,3D打印等各类的机器人工艺类似,其流程主要包括,导入机器人及工件> 工件的定位与机器人标定>实现轨迹编程> 全场景的仿真> 代码输出及机器人加工
1.利用iRobotCAM跨平台的技术架构,以基于中望3D平台为例
1) 支持导入包括Catia, Solidworks, NX,Creo, Solidedge, Inventor, ACIS, Step, Parasolid等数十种不同的格式,直接在三维空间中建立包括机器人,工件,工作台等现场需要参与分析的数据模型。
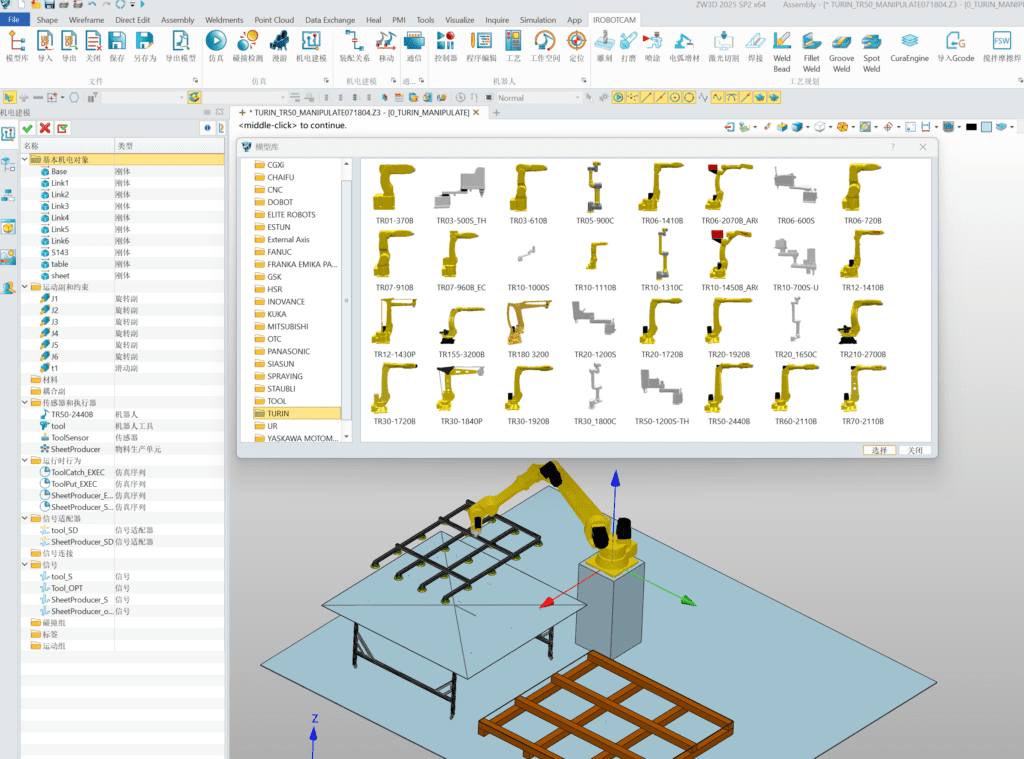
2)利用iRobotCAM的机电模块及预置的机器人库与工具库,支持ABB, Kuka,发那科,安川,松下,三菱,采埃芙,广州数控,华中数控,汇川,埃斯顿,宝信图灵, 遨博,UR,智绘机器人等品牌,全面优化中国品牌的工业机器人,兼容上百个品牌的机器人; 满足数十个自由度的并联机器人的建模支持与仿真。
2.工件的标定与机器人的标定:利用iRobotCAM独有的视觉标定模块,可以实现工件的摆放与定位的纠偏,保障编程仿真与加工的一致性。
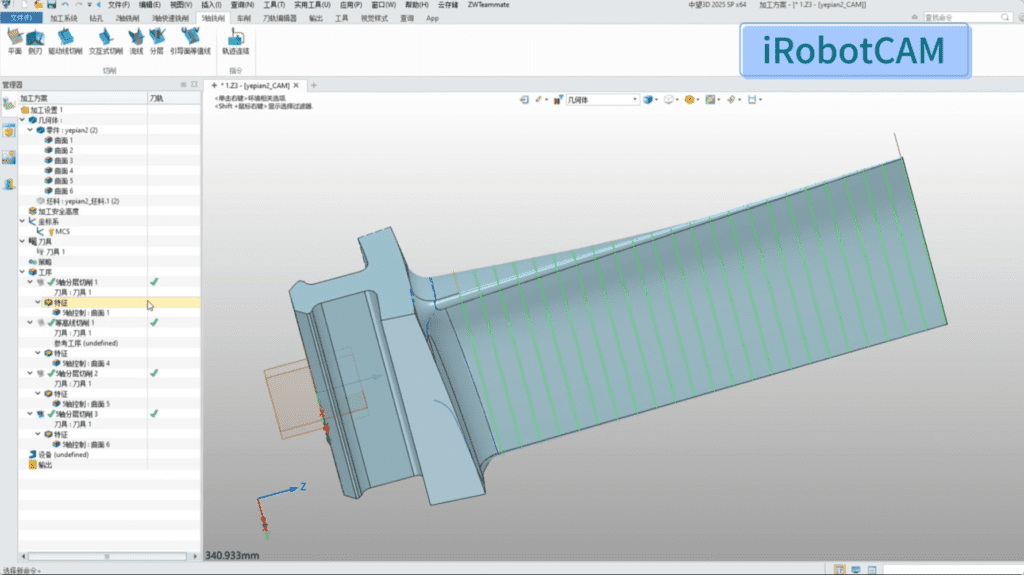
3.根据激光熔覆加工工艺的需求,利用内嵌的2轴到5轴的轨迹算法,实现基于CAM的复杂高精度轨迹,满足叶片等各种复杂开头的轨迹需求。
4.基于iRobotCAM 自研的运动学架构的物理引擎,仿真机器人的运动,实现可达性的分析,碰撞分析,并针对性的进行优化仿真。
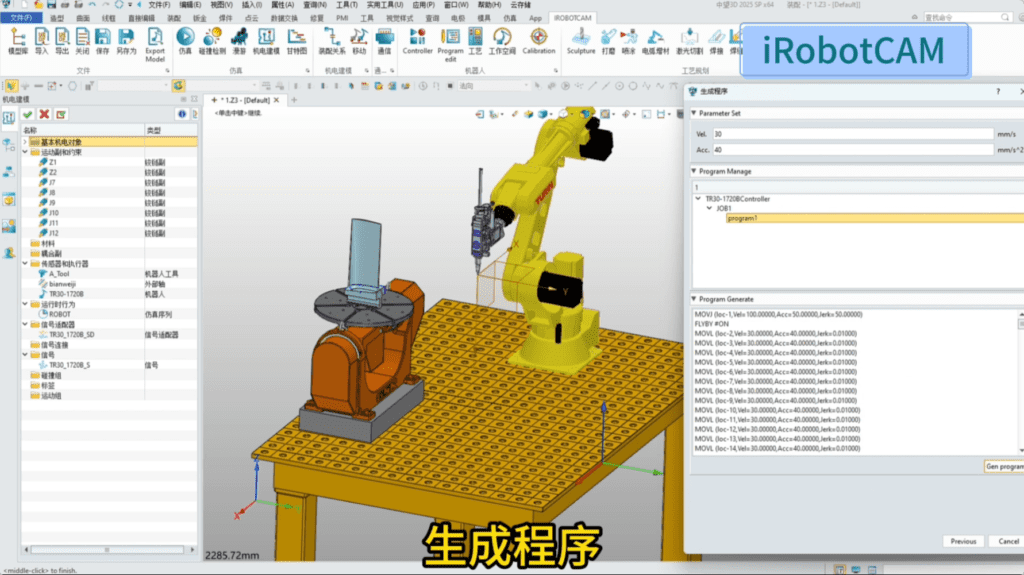
5.利用iRobotCAM的后置处理模块,兼容上百个品牌的机器人的代码输出,从而实现激光熔覆加工。
接下来,我们分别看一下在单轴变位机与图灵工业机器人的叶片熔覆加工,与双轴变位机与图灵工业机器人熔覆编程与仿真的详细过程。
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计与仿真平台,是具身智能设计,机电设计,离线编程,虚拟调试的一体化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


