摘要:2026 ITES深圳工业展3月31日至4月3日在深圳会展中心举办,超1500家海内外品牌参展,具身智能机器人的展览更是人潮涌动。面对技术爆发期的具身智能机器人在各个行业的应用,本次通过专访机器人设计与仿真软件开发商越擎科技创始人,作为一线的具身智能落地的服务企业,如何看待目前的具身智能的发展趋势与落地节奏。
2026 ITES深圳工业展,又称第27届ITES深圳工业展暨高端装备产业集群展,是于2026年3月31日至4月3日在深圳国际会展中心(宝安)举行的一场工业展览会。该展览以“穿透产业·智造聚变”为主题,16万平方米展馆汇聚超1500家海内外工业品牌,展示具身智能、AI服务器、半导体装备、新能源汽车等前沿应用,并举行80余场主题论坛,核心内容包括高端装备、机器人及自动化、精密零组件三大主题展。
具身智能机器人的发展离不开软硬件生态的完善,而落地则直指具体的应用场景,作为工业机器人软件厂商,主要专注的是工业应用的场景,也面临着各种不同应用场景的企业需求,为此,我们采访了机器人设计与软件开发商越擎科技创始人,从机器人工业软件的研发与落地角度上,进一步了解企业在具身智能行业的思考与落地。

首先,我们先了解一下越擎科技的背景,越擎科技的核心产品是机器人设计与仿真软件iRobotCAM,举个简单的例子,一个机器人,不管是具身智能机器人或传统工业机器人,首先要做的是动作规划,就像人一样,你得知道让机器人做什么样的动作来完成什么样的工作。更具体的讲,就跟现在很火的小龙虾openclaw一样,你得教他用什么样的技能,完成什么样的工作。而具体到工业场景的落地上,各种技能则更是千差万别了。但我们抽取出共性问题,那就是数据的可靠性,原生数据的准确性是一切的基础,这也是为什么工业软件企业在应用场景的落地的关键所在,需要满足0.01mm级或更高精度的应用需求。

问题1:具身智能赛道非常火热,现在慢慢已经出现很多提示具身智能的落地风险的问题了,越擎科技作为典型的机器人设计与仿真软件的企业,作为具身智能落地感受比较深刻的企业,如何看待具身智能过热的问题?
越擎科技创始人(唐怀磊):我们在深圳工业展上可以看到具身智能的从业者齐聚一堂,共商具身智能的技术发展方向,正处于技术的爆发期与落地期,首先过热有点言过其实; 从产能的数据看,具身智能的机器人的产能才刚刚过万级,与几十万级的传统工业机器人的产能不可同日而语,而更进一步讲,面对着未来的机器人智能化而产生出的应用落地的需求,可能千万级的,只能说具身智能的落地才刚刚起步。而目前所谓的过热,应该是指当前落地应用的具身智能的数量级没有预期中的爆发快。
从具身智能的落地预期上,我们看到传统的工业机器人,那是几十年积累起来的应用场景,汽车,家电,消费电子等各种黑灯工厂,那都不是几年就建立起来的,而是基于几十年的工业应用的共建才发展起来的。所以对于具身智能,核心还是上下游的生态共建,才能加快落地节奏,要具备一定的耐心。
问题2:具身智能的落地上,有什么关键阻碍吗?
越擎科技创始人(唐怀磊):落地的相关方的协同是最重要的,具身智能的落地的场景主要涉及的不外于软件与硬件,硬件是可靠性与精度,而软件则是要满足细分场景的柔性化应用。
具体的讲,硬件除了背后的制造供应链外,硬件要表现出来的精度则是产品力的核心体现,打个比方,工业机器人的应用精度是0.1或0.01mm,一个数量级别的差别,这就是工业级别的应用的要求,这远远不是普通的表演机器人可比的。软件要面对着各种机器人的应用场景,比如说典型的汽车厂的焊接与喷涂,电子产品的打磨与喷涂,飞机制造的打磨与喷涂,等等,这些都是通用的机器人加专用的技能才能解决,而技能的训练则需要柔性,以从业人的角度来看,那就是机器人软件要具体柔性化的设计,适配这些应用场景。
除了硬件和软件的核心能力外,这里有一个关键参与方,也是最核心的用户场景,具身智能的核心能力除了在软件上调试外,还需要实打实的用户场景的迭代与验证,这就是为什么工业应用场景的落地节奏预期更慢的原因。
但我们从深圳工业展可以看到的非常积极的一面,以人形机器人为例,核心的灵巧手部件已经步入成熟期了,以因时机器人为代表,其出货量已经突破万级。同时,灵巧手的部件已经模块化,说明未来的技术可能迎来加速期,而供应链也迎来成熟期。
当硬件与软件上都展现出积累的技术积累时,用户端已经看到了落地的可能性了,用户的场景的落地也就是顺理成章,指日可待了。
问题3:iRobotCAM作为机器人设计与仿真软件,在具身智能赛道主要是解决什么落地的问题的
越擎科技创始人(唐怀磊): iRobotCAM作为典型的具身智能设计与仿真软件,主要解决的是两个核心问题,
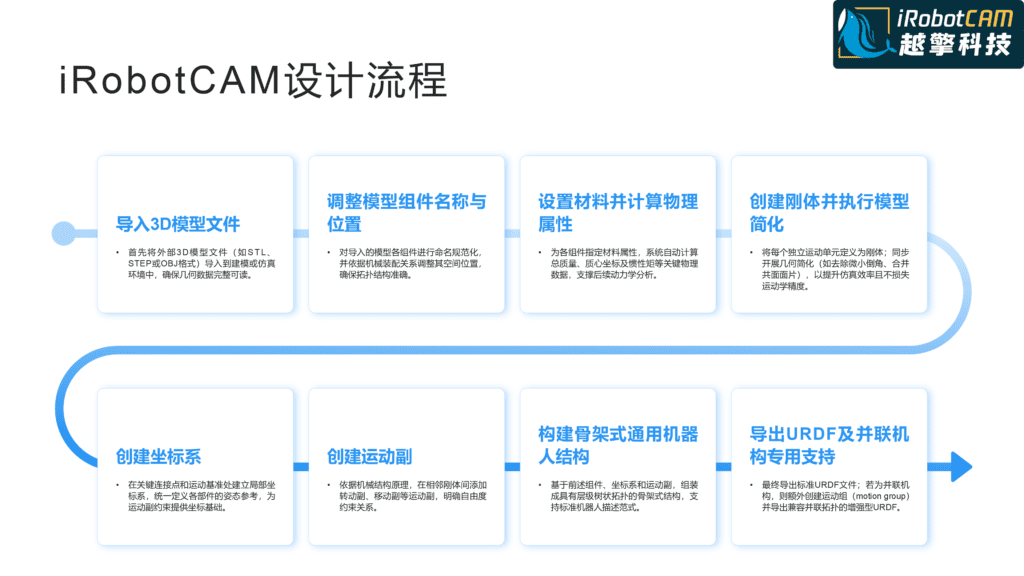
- 机器人结构设计到具身智能设计的跨越:对于所有的设计企业来讲,如何设计具身智能机器人涉及到各种新的知识结构的积累,而iRobotCAM正是为了解决这个问题而开发,基于CAD的高精度的软件架构,利用具身智能的设计思路来设计具身智能机器人,通过骨架式的设计流程,就可以设计出满足动力学架构的模型,与Isaac sim, opensim, mujoco等仿真生态对接。
- 机器人的行为规划能力:机器人设计出来了,也造出来了,那用来做什么工作?iRobotCAM具备行为规划能力,规划机器人的运动,适配机器人的应用场景。比如说,机器人用来抓放,机器人用来焊接,机器人用来激光切割,还是做什么工作,iRobotCAM具备规划各种不同类型的行为运动的轨迹能力。
问题4:如何看待未来具身智能的落地节奏
越擎科技创始人(唐怀磊):作为机器人应用落地的一线软件服务商,各个行业各不相同,我们只能从自身的理解来展望具身智能的落地节奏,以供参考
- 机器人的数据源快速增长:如果具身智能的落地加快,而数据源头是一个行业指标,而如何形成高质量的机器人动力学模型则是关键,而iRobotCAM就是加速这一过程的工具,可以快速的从结构设计转向具身智能设计。而当高质量机器人动力学模型出来了,那后续的仿真与训练的效率将会几何级的提升。
- 工业应用场景的突破:工业应用场景有天然的需求,当各种具身智能的数据在各个工业场景中连接,那具身智能的上下游产业链将会得到跨越式的完善,迈向成熟的应用。
问题5:作为业内人士,预测下具身智能机器人的爆发时刻
越擎科技创始人(唐怀磊):具身智能的爆发势不可挡,这是技术发展的必然,很多科幻或想象中的东西正在慢慢变成现实,但毕竟每个人所处的行业或视角各不相同,自身的预测不一定准确,从我们自身的发展规划来看,我们重点是与用户打磨好应用场景,加快工业化场景落地的节奏。如果说一定要有个时间来预测的话,跟紧具身智能的风向标企业,硬件是一个先行指标,硬件的突破将会是工业场景的落地的爆发到来的时刻,而这个时间不会太远,我们期望三年内可以看到,目前我们的iRobotCAM机器人设计与仿真软件具备人形,四足等具身智能体的设计能力,有非常多的人形机器人公司,灵巧手公司与我们合作,我们也为具身智能的生态的发展进一步加大投入。
下面我们以一个四足机器狗来看一下iRobotCAM是如何快速进行具身智能的设计与仿真的:
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计与仿真平台,是具身智能设计,机电设计,离线编程,虚拟调试的一体化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


