摘要:针对具身智能领域,iRobotCAM全面支持串联机器人与并联机器人的设计,支持URDF输出与MuJoCo XML输出,并支持MuJoCo, ISAAC SIM等各类仿真软件与训练软件的应用。针对第三方软件如Solidworks等3D软件导出的URDF,iRobotCAM发布URDF超级简化功能,根据自有的动力学仿真引擎架构,在不影响精度的前提下,仿真速度提升可高达10倍。
iRobotCAM的超级简化功能的推出背景在于完善与上下游的具身智能设计交互的工具链,针对各个3D软件导出的URDF文件的仿真前处理,iRobotCAM可快速的精简高达90%的网格数量,从而达到10倍级别的仿真效率的提升。而iRobotCAM的模型简化是如何实现的呢?
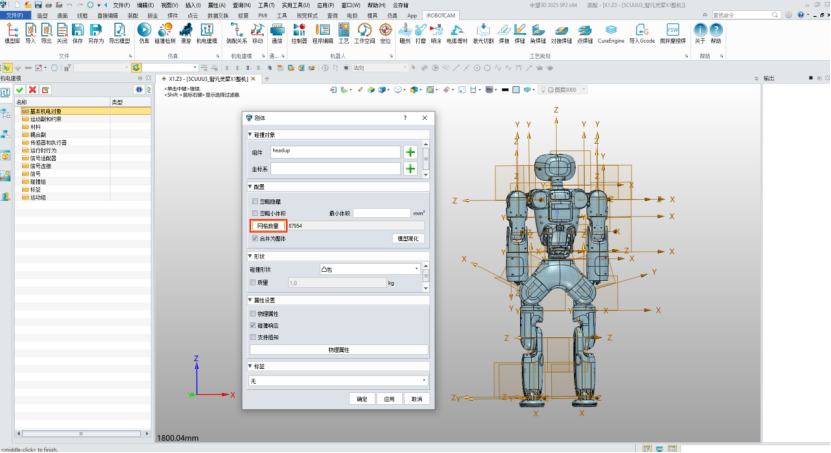
1.支持计算模型网格数量。在创建刚体时,选择组件后,点击“网格数量”按钮,可计算出模型的网格数量。
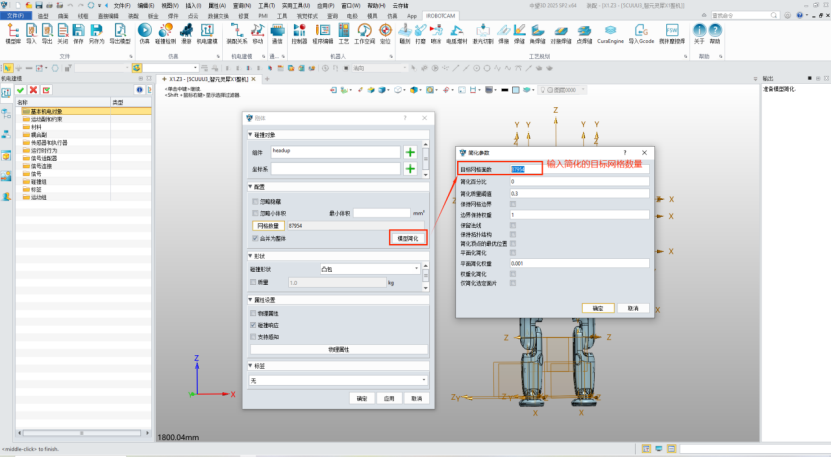
2.支持输入目标网格参数,一键简化模型。点击“模型简化”,在模型简化界面,输入目标网格数量,可直接简化模型网格数量为输入的值。
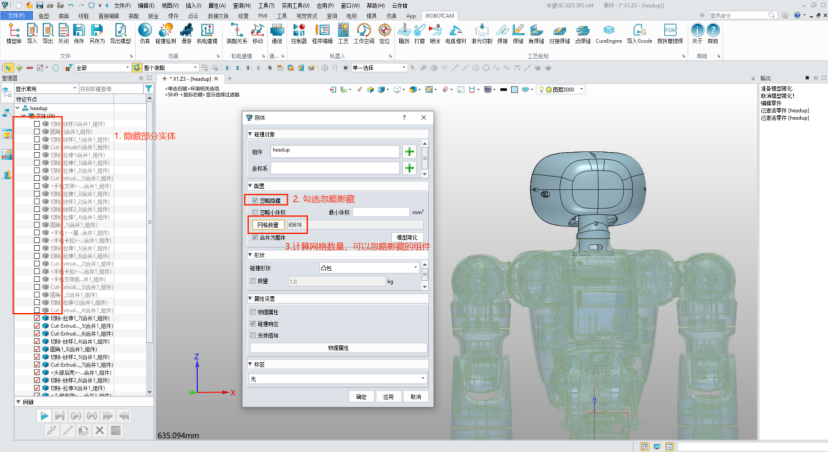
3.支持通过忽略隐藏的实体,简化模型。进入模型节点,不勾选部分实体,在创建刚体界面,可忽略不勾选的部分,减小模型网格数量。
4.支持通过忽略小体积后的模型,简化组件模型。勾选“忽略小体积”,输入需要忽略的体积数值,可以把低于输入值的组件忽略不计算。

以Solidworks导出的URDF文件为例,iRobotCAM是如何一步步的实现以上的URDF的超级简化功能操作,并做MuJoCo仿真验证的呢?
- 从Solidworks中导出URDF文件;
- URDF文件导入到IROBOTCAM中,查看刚体属性,执行模型简化操作,导出简化后的模型;
- 替换原来的模型文件,快速导入Mujoco仿真
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计与仿真平台,是具身智能设计,机电设计,离线编程,虚拟调试的一体化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


