具身智能的快速发展,使得设计上百花齐放,有两足的机器人,有两足的机器鸭,也有四足的机器狗,甚至四足的独角兽,形态不一,背后的核心逻辑在于智能体的设计。而如何快速的将以结构设计为主的模型转化为以具身智能机器人设计为标准的模型,这正是越擎科技致力于打造iRobotCAM的的根源,iRobotCAM就是一款可以快速的满足结构设计到具身智能设计的工具软件,也可能是市面上最简单的具身智能机器人设计与仿真软件。
目前开源社区上,有包括灵犀机器人等人形机器人为代表的模型,也有波士顿为代表的四足机器人等,我们以开源社区的波士顿的四足机器狗为例,一步步的简要阐述如何实现机器人的设计与仿真。
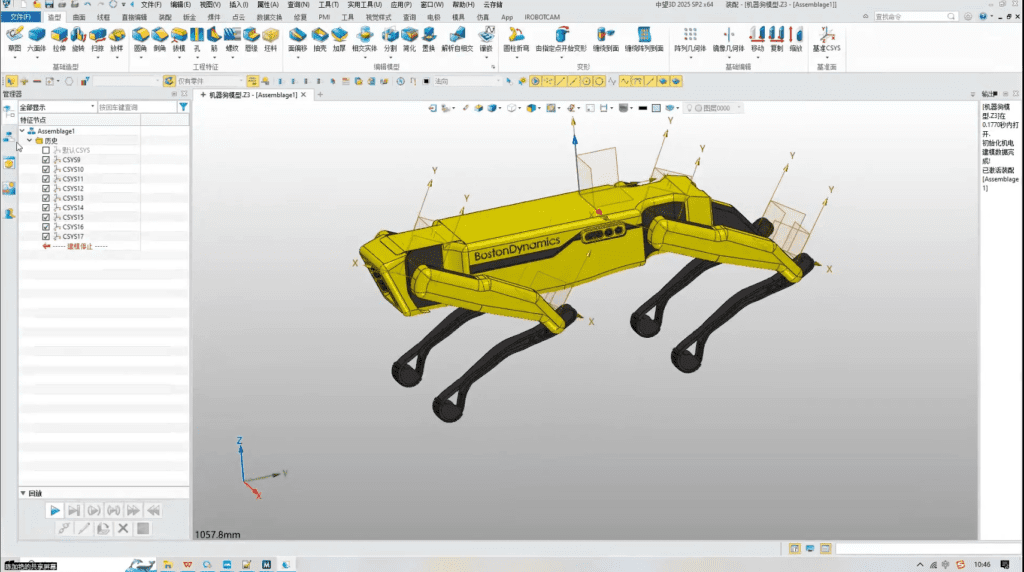
1.iRobotCAM基于三维几何内核的技术架构,可以导入来自于各个三维软件的包括Catia, Solidworks, NX, Creo, Inventor等数据格式,而利用多文件导入Solidworks或Step的机器狗文件,可以在iRobotCAM建立四足机器人的三维结构图。
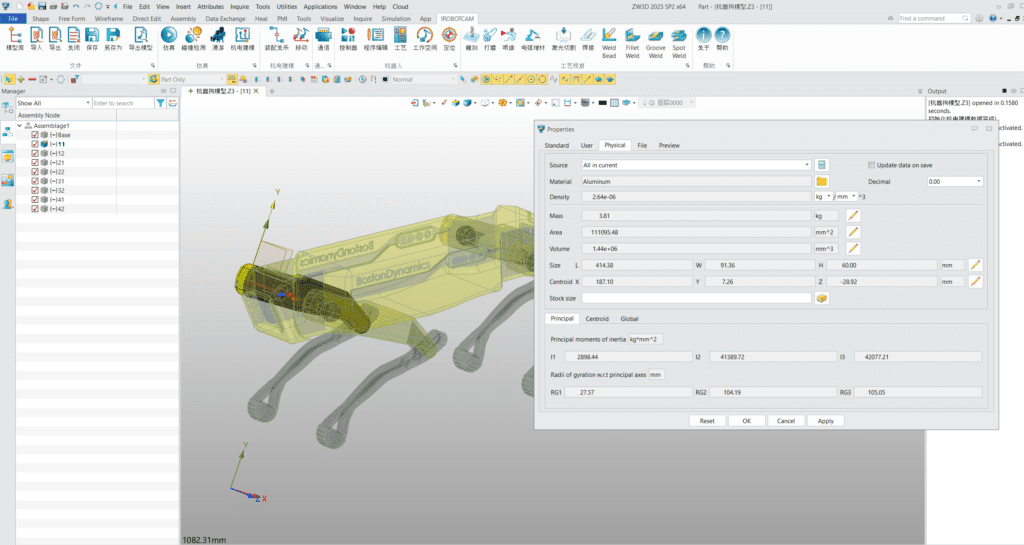
2.利用便捷的装配管理功能,可以快速的设置每个零件的材料属性,计算惯量等物理特性
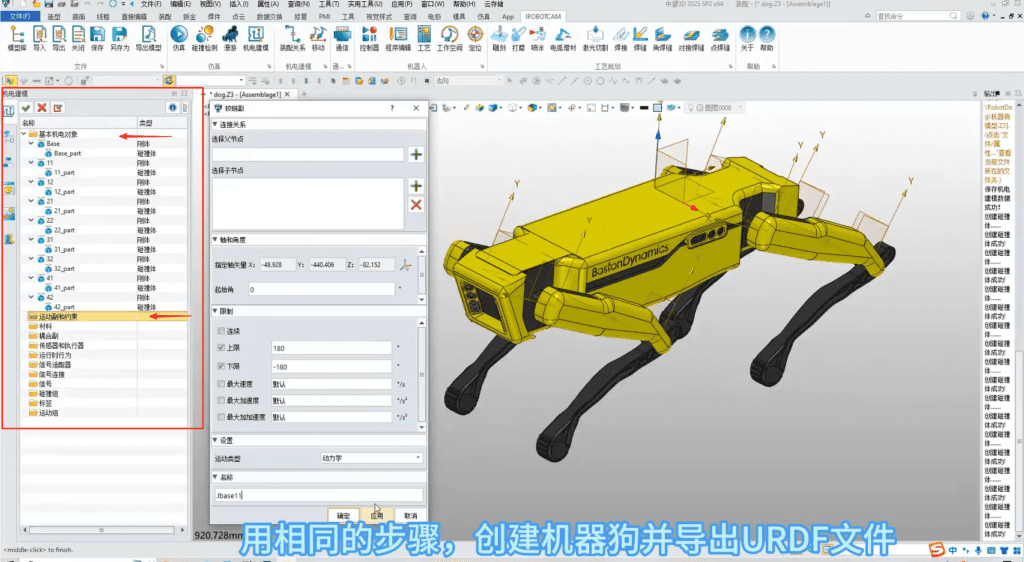
3.iRobotCAM作为一个专业的机器人设计与仿真软件,利用机电设计功能,可以建立机电对象及运动副,包括碰撞体检测等
4.利用便捷的骨架式的机器人关节设计面板,可以将机器人的所有关节机构的关联起来,形成完慗的具身智能通用机器人。
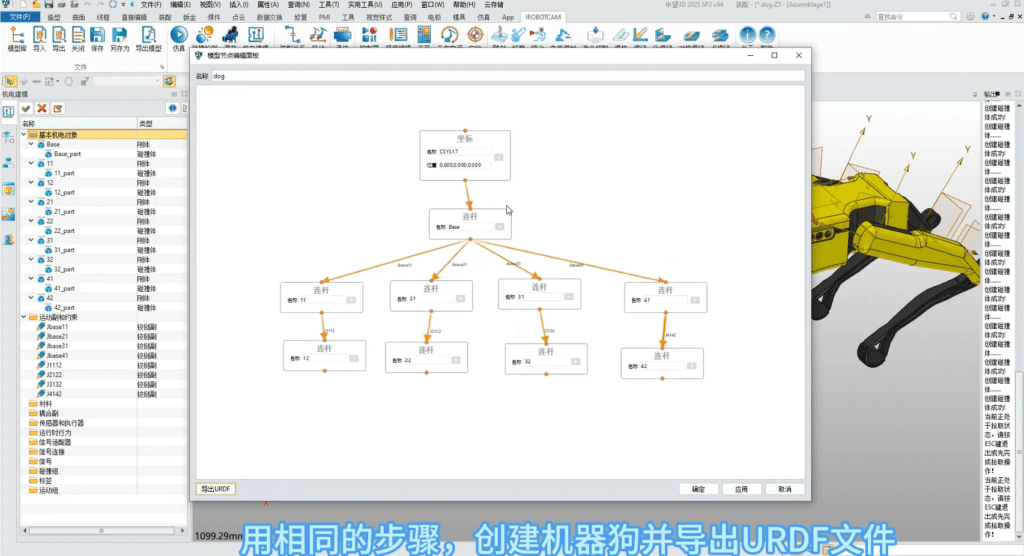
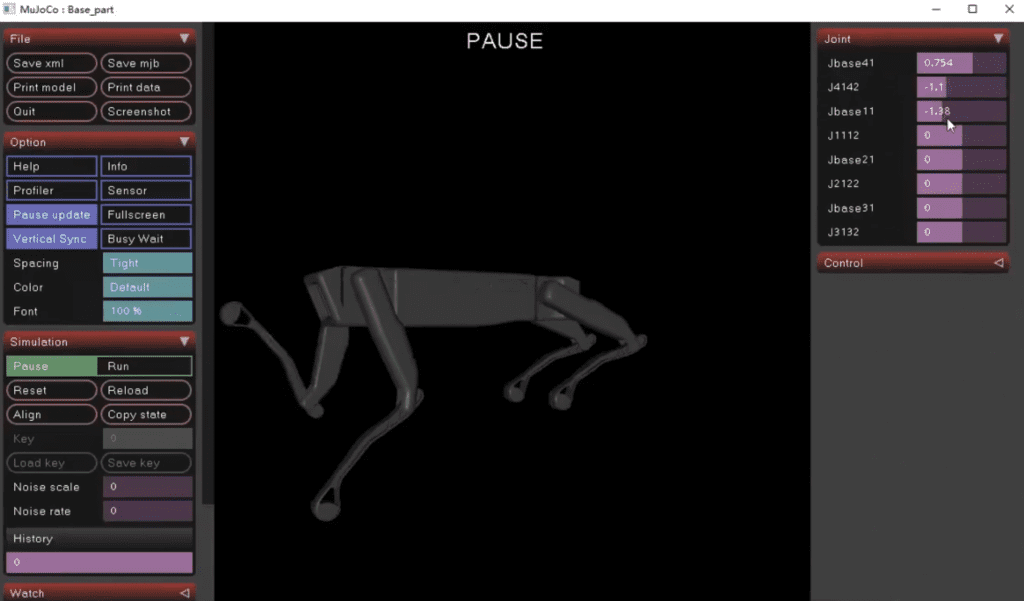
5.利用iRobotCAM便捷的URDF导入与导出功能,通过生成通用的 URDF 文件,无缝对接MuJoCo、Simbody、OpenSim , Isaac sim等主流生物力学引擎仿真需求。
利用iRobotCAM机器人设计工具,机器人设计与仿真不再繁琐, 与此同时,根据具身智能机器人设计需求或仿真数据的反馈,机器人的结构设计也可以随时更新,通过设计与仿真的不断验证,最终形成满足需求的机器人。
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计,编程与仿真平台,是集产线机电概念设计,离线编程与虚拟调试,机器人建模与训练等一体的数字化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


