摘要: 越擎科技与某全球领先的灵巧手企业达成合作,作为机器人设计与仿真软件,iRobotCAM针对灵巧手的设计需求,借助iRobotCAM基于动力学的建模的技术架构, 高效的建立动力学架构的三维模型,并提供URDF, MuJoCo XML等作为动力学仿真软件的交互层,完善具身智能的设计与仿真解决方案。
具身智能行业的高速发展,从结构设计到具身智能的设计过程中,急需面向具身智能设计的设计方法,越擎科技通过携手全球领先的灵巧手企业,分析灵巧手企业的需求,在具身智能设计上提供了一整套高效便捷的设计与仿真解决方案。

对于灵巧手的设计流程,iRobotCAM是如何解决灵巧手从结构设计到基于动力学建模的具身智能设计的呢?
“灵巧手作为具身智能机器人的末端的表现形式之一,具备20几个自由度,iRobotCAM的核心优势在于其基于机器人运动学的技术架构,目的正是为了建立高复杂度的机器人动力学模型而诞生。通过iRobotCAM骨架式的关节设计,可以直观呈现动力学模型的关联关系,成为具身智能设计的好帮手”, iRobotCAM创始人 唐怀磊先生对于具身智能的解题思路进行进一步的阐述。
而在实际操作层面,iRobotCAM又是如何一步步的将简单的流程渗透到灵巧手的设计中的呢
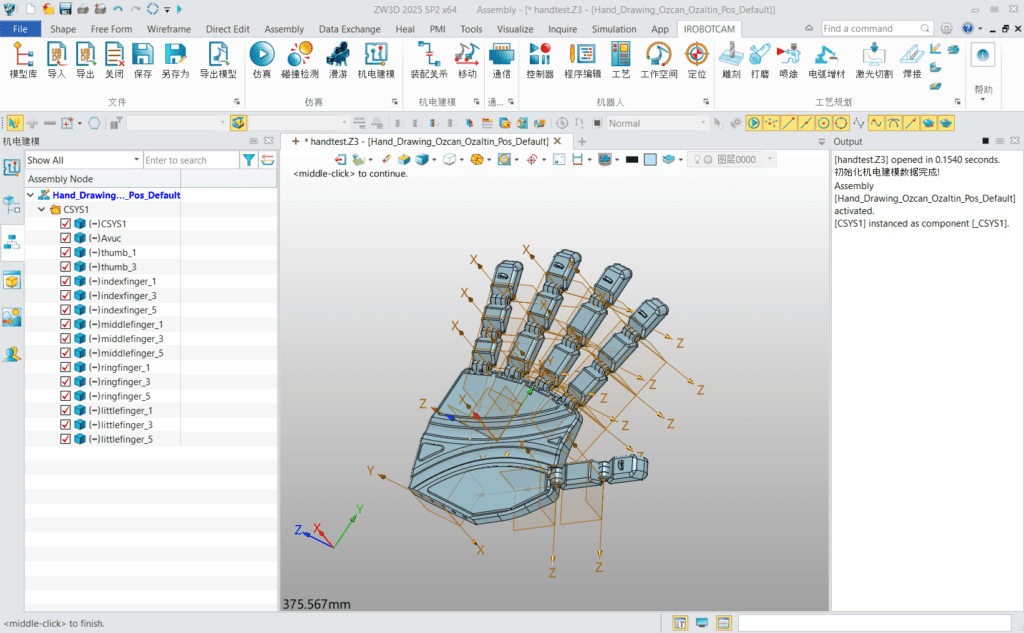
1.iRobotCAM基于三维几何内核的技术架构,可以导入来自于各个三维软件的包括Catia, Solidworks, NX, Creo, Inventor等数据格式,而利用多文件导入Solidworks或Step的灵巧手文件,可以在iRobotCAM建立灵巧手的三维结构图。
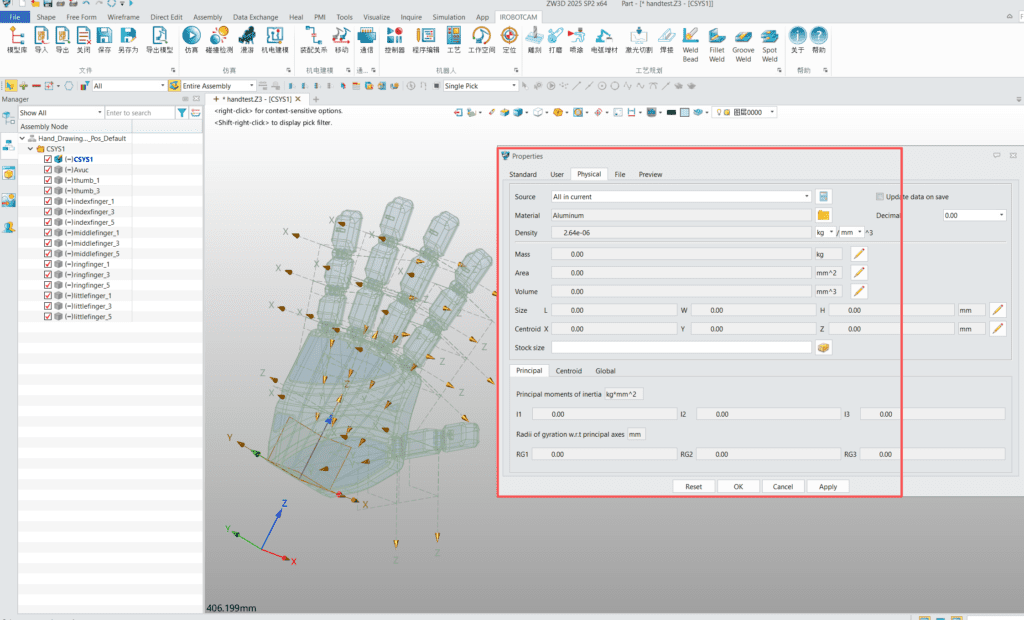
2.利用便捷的装配管理功能,可以快速的设置每个零件的材料属性,计算惯量等物理特性
3.iRobotCAM作为一个专业的机器人设计与仿真软件,利用机电设计功能,可以建立机电对象及运动副,包括碰撞体检测等。
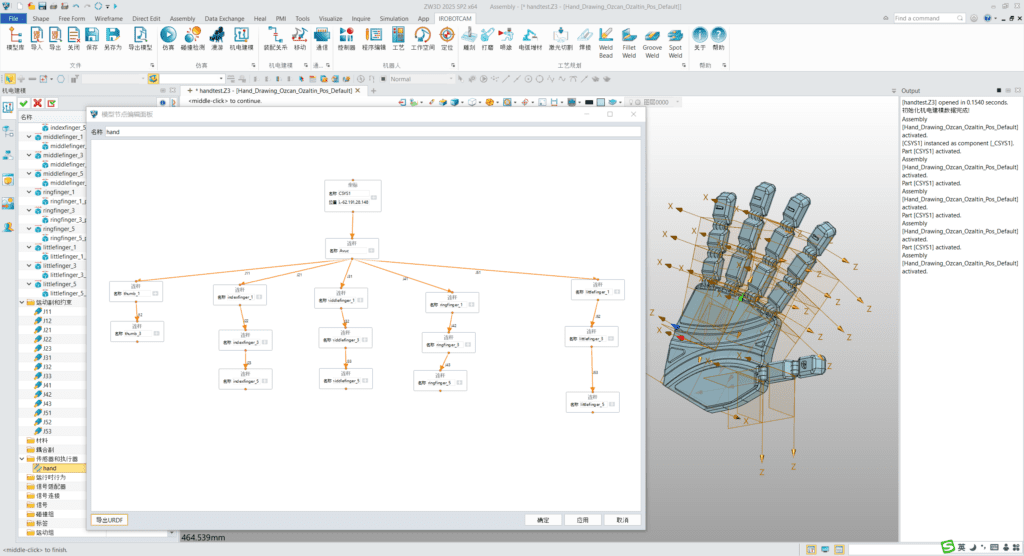
4.利用便捷的骨架式的机器人关节设计面板,可以将机器人的所有关节机构的关联起来,形成完整的具身智能通用机器人。
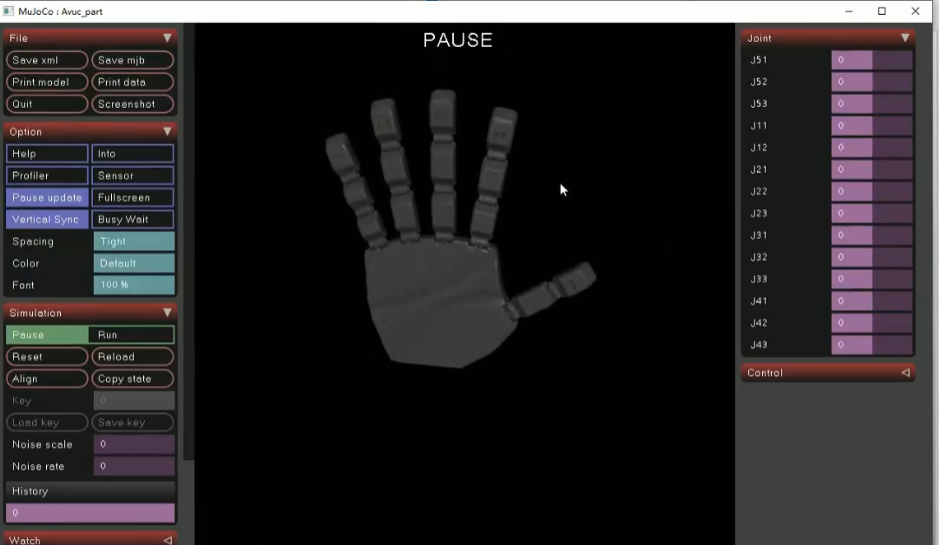
5.利用iRobotCAM便捷的URDF导入与导出功能,通过生成通用的 URDF 文件或MuJoCo XML,无缝对接MuJoCo、Simbody、OpenSim , Isaac sim等主流生物力学引擎仿真需求。
利用iRobotCAM机器人设计工具,灵巧手的设计与仿真不再繁琐, 完善的动力学模型可以在数据源头上保障数据的正确,加速具身智能灵巧手的设计与量产效率。
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计与仿真平台,是具身智能设计,机电设计,离线编程,虚拟调试的一体化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


