摘要: 机器人焊接司空见惯,深入汽车,电子,航天,家具等各个行业,而对于复杂的工件而言,一般会涉及到工业机器人与变位机协同编程与仿真,由于复杂度高,往往费神费力,本文主要介绍如何利用机器人离线编程软件iRobotCAM来快速的实现高精度的编程与仿真,满足复杂工件的高精度焊接。
机器人焊接的应用已经渗透到汽车,电子,航天,家具等各个行业,应用场景多种多样,而从技术的进化路线图上,主要包括手动的示教编程,离线编程,免示教编程等。而如果我们进一步归纳简化焊接的工艺,不外乎就是处理焊接轨迹,配合焊接工艺来完成焊接的工作,而从目前的焊接的行业应用来看,不外乎就是以下两种技术路线
- 简单的焊接:示教编程成为历史,免示教成为主流,而视觉技术,激光跟踪技术等的应用,也进一步的加速激光的定位与焊接同步协同的可能性,不断的满足各类细分的焊接场景的需要。
- 复杂的焊接:一般涉及到的是高精度,变位机协同等场景,考验的是对于高精度的轨迹的控制与焊接机器人的工艺配合来完成复杂的焊接。
而随着国产工业软件的持续突破,对于高精度的焊接的解题思路上,以国产机器人离线编程软件iRobotCAM为例,选择基于CAD的架构上来解决复杂的高精度的轨迹生成及控制问题,从而从根源来提供了高精度的解题方法。
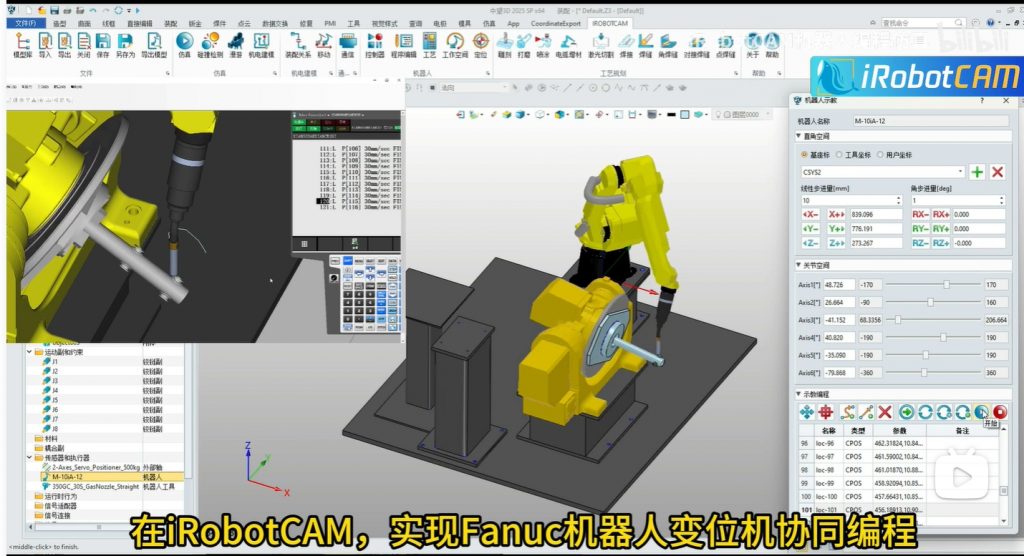
我们以发那科工业机器人与变位机协同编程为例,来进一步阐述iRobotCAM如何实现复杂工件的焊接编程与仿真的。
- iRobotCAM基于三维几何引擎中望3D,可以生成焊缝,实现焊缝的快速拾取或自动拾取,实现焊缝数据的高精度保障。
- iRobotCAM基于CAM的五轴轨迹策略,丰富的轨迹方法,可以自动生成任意复杂的焊接编程轨迹,满足不同行业各类特定轨迹的需求。
- iRobotCAM基于多轴联动的技术架构及可靠的物理引擎,可以实现工业机器人与变位机的联动,从而实现协同编程与仿真。
易用性无颖是复杂焊接的的考点,我们通过一个视频,针对复杂的管头等零件,来一探iRobotCAM是如何实现快速上手,实现发那科工业机器人与变位机协同焊接编程与仿真的。
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM机器人建模,编程与训练平台,是集产线机电概念设计,虚拟调试,机器人建模与训练等一体的数字化解决方案.
iRobotCAM网站: www.iRobotCAM.com,联络邮件: cooperation@iRobotCAM.com


