跳至正文
越擎科技
iRobotCAM机器人设计与仿真软件
产品
iRobotCAM具身智能设计与仿真
iRobotCAM离线编程与仿真
六自由度力反馈器
机器人轨迹定位笔
支持
下载安装
基础教程
基本功能
用户手册案例
专题培训
具身智能专题
离线编程专题
常见问题知识库
入门必读事项
常用功能注意事项
案例
具身智能设计与仿真
力反馈与机器人遥操作
焊接
喷涂
抛光打磨
雕刻
3D打印增材制造
激光加工与仿真
产线仿真与虚拟调试
自动化检测
生态合作
生态合作资讯
生态合作伙伴
关于
关于公司
生态合作
联系我们
购买
语言 | Language
中文
日本語
한국인
čeština
Español
Deutsch
English
Français
Italiano
Polski
Português
Русский
Türkçe
ยาสุฟุมิ
Tiếng Việt
越擎科技
iRobotCAM机器人设计与仿真软件
导航菜单
导航菜单
产品
iRobotCAM具身智能设计与仿真
iRobotCAM离线编程与仿真
六自由度力反馈器
机器人轨迹定位笔
支持
下载安装
基础教程
基本功能
用户手册案例
专题培训
具身智能专题
离线编程专题
常见问题知识库
入门必读事项
常用功能注意事项
案例
具身智能设计与仿真
力反馈与机器人遥操作
焊接
喷涂
抛光打磨
雕刻
3D打印增材制造
激光加工与仿真
产线仿真与虚拟调试
自动化检测
生态合作
生态合作资讯
生态合作伙伴
关于
关于公司
生态合作
联系我们
购买
语言 | Language
中文
日本語
한국인
čeština
Español
Deutsch
English
Français
Italiano
Polski
Português
Русский
Türkçe
ยาสุฟุมิ
Tiếng Việt
机器人设计与仿真软件 iRobotCAM
基于中望3D三维CAD平台
试用下载
诚邀经销商或技术合作伙伴
携手拓展机器人设计与仿真生态解决方案
联络我们
Previous
Next
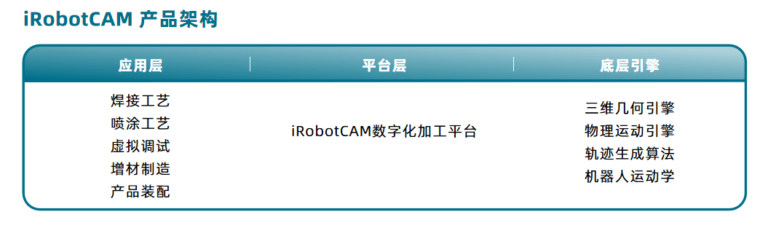
iRobotCAM产品架构
iRobotCAM产品优势
一体化解决方案
满足机器人产线设计,离线编程,虚拟调试
可靠的物理仿真引擎
具备虚拟调试与实际工作站的联调
开放的工艺集成架构
便捷的工艺集成模块,可快速的集成定制化的工艺模块
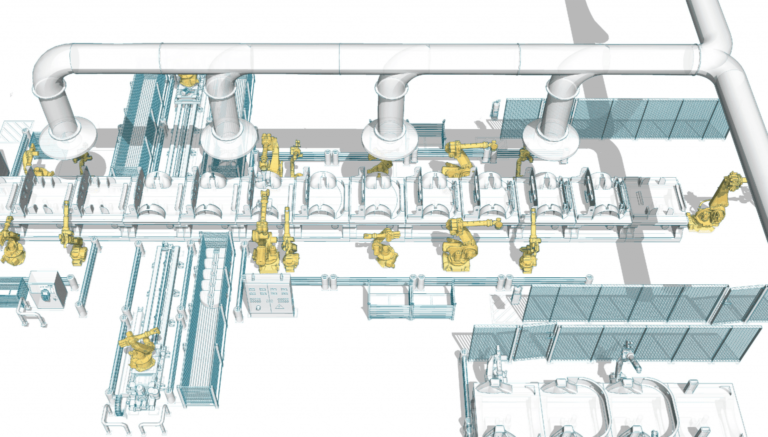
机器人产线设计
利用参数化设计软件,满足单机器人工作站设计和机器人产线设计
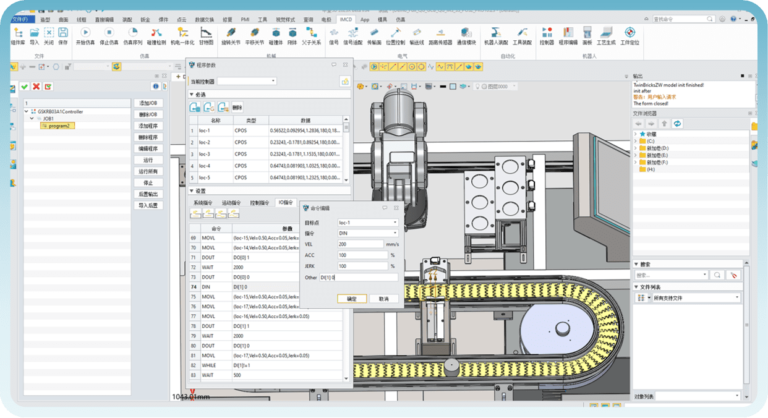
离线编程与编程验证
编程流程:
机器人模型导入–>工艺规划–>加工过程仿真–>工作站系统优化–>后置代码输出;
编程验证:
支持机器人程序反编译,可验证、优化机器人程序;
机器人库:
支持ABB, Kuka,发那科,安川,松下,三菱,采埃芙,广州数控,华中数控,汇川,埃斯顿,宝信图灵, 遨博,UR,智绘机器人等品牌;同时支持自定义更多机器人库。
机器人虚拟调试
具备虚拟调试与虚拟监控,可实现虚拟机器人系统工作站与实际机器人系统工作站动作同步;
支持多机器IO通信模拟仿真,支持多机器人同步,机器人多轴联动规划;
支持包括西门子,三菱,汇川等PLC信号系统;同时支持自定义更多信号接入设备。
了解更多
了解更多iRobotCAM机器人加工解决方案
产品介绍书下载
咨询电话: 189 2322 4286
关注iRobotCAM视频号
关注iRobotCAM抖音号