越擎科技
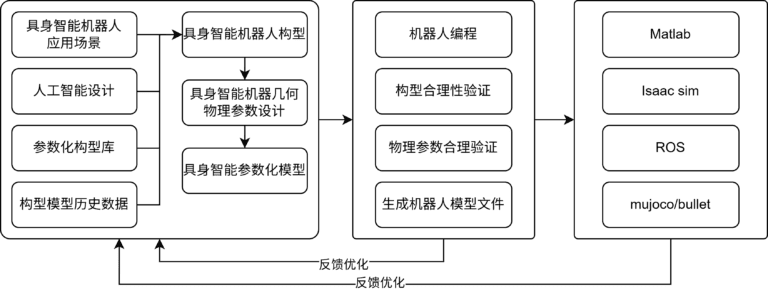
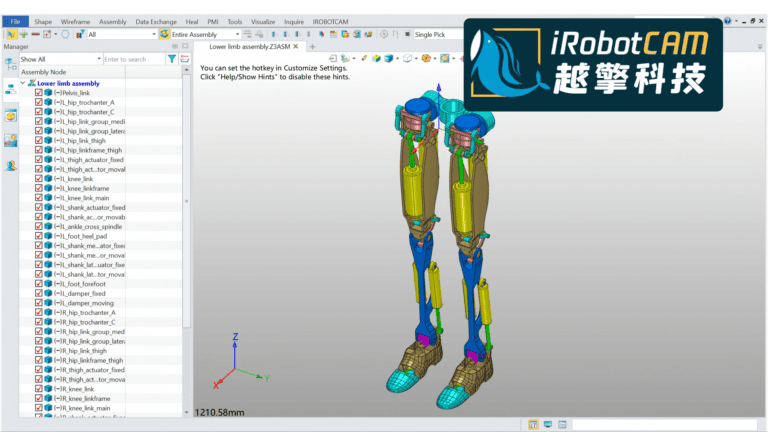
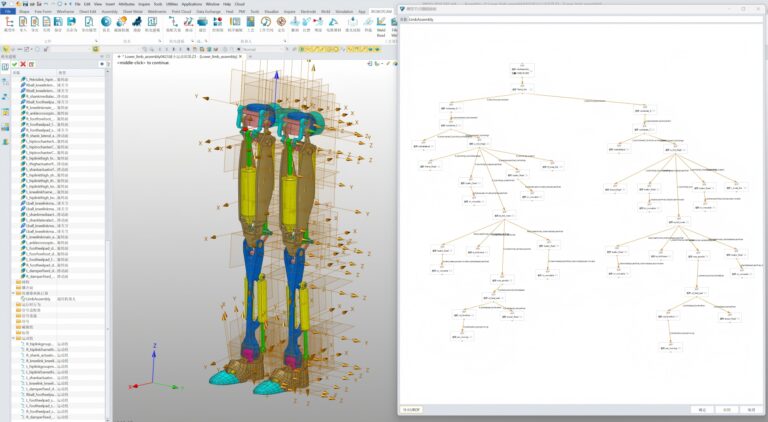
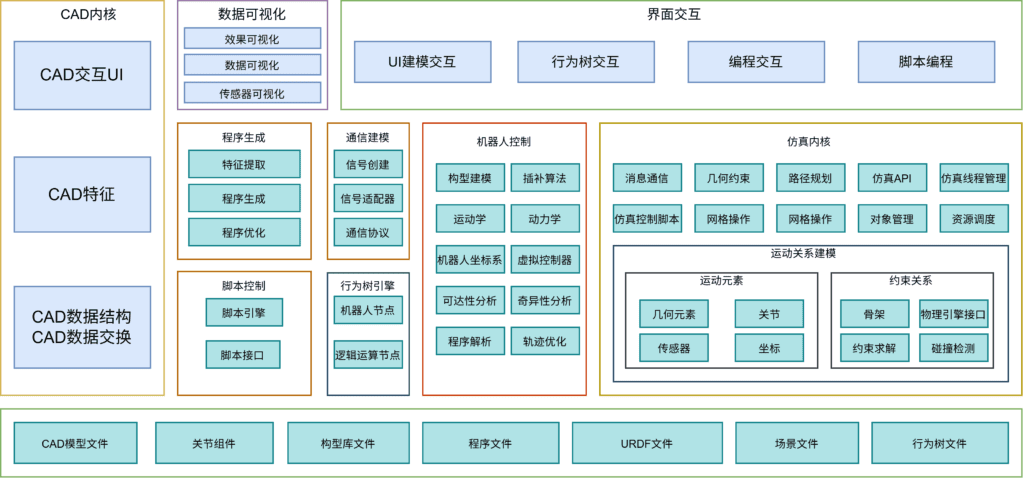
基于机器人运动学,iRobotCAM具身智能设计与仿真软件满足灵巧手,人形机器人,四足机器狗,特种机器人等具身智能体的设计与仿真;全面支持串联机器人与并联机器人的设计,支持URDF输出与MuJoCo XML输出,并支持MuJoCo, ISAAC SIM等各类仿真软件与训练软件的应用。
免费,iRobotCAM 全周期无忧服务计划,名额有限,先到先得