第一章 软件安装
1.1 安装前提
- 电脑Windows规格:支持win10 64bit即以上版本。
- 中望3D版本要求:最低支持中望3D 2023X教育版版本、中望3D 2024版本无要求。
- 本产品是基于中望3D软件专家级别开发的。
1.2 安装试用 + 激活版
安装前注意事项
- 首次安装安装包有效期可以试用30天。
- 试用到期后需要激活授权才可继续使用。
- 安装本安装包前需要安装完成中望3D软件(官网下载),下载完成后打开运行中望3D,然后关闭软件,最后双击本安装包进行安装。
- 双击打开安装包“IROBOTCAM-V1.0-plugins-for-ZW3D2024.exe”进行安装,点击“下一步”。如下图所示:
- 阅读完许可证信息后,点击“我接受”。接着是用户个人相关信息填写,点击“下一步”,如下两幅图所示:
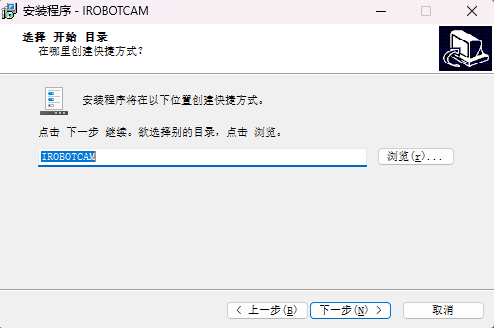
- 选择安装,欲改变点击浏览按钮,然后点击“下一步”。接着是创建快捷方式的,欲改变点击浏览按钮,然后点击“下一步”,如下图所示:
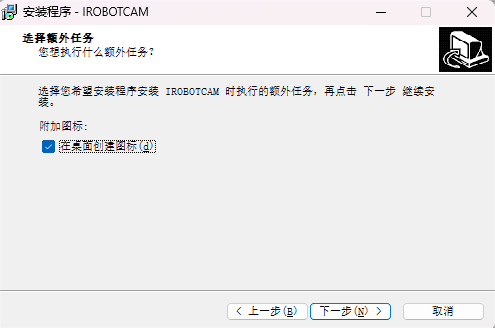
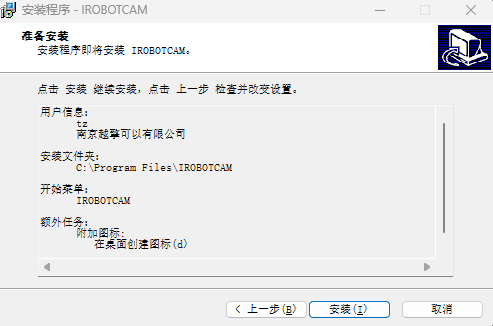
- 额外任务默认在桌面上创建图标,欲更改取消勾选,然后点击“下一步”。接下来是准备安装,这里会显示你之前填写的信息和选项,欲更改点击“上一步”,无更改点击“安装”,如下图所示:
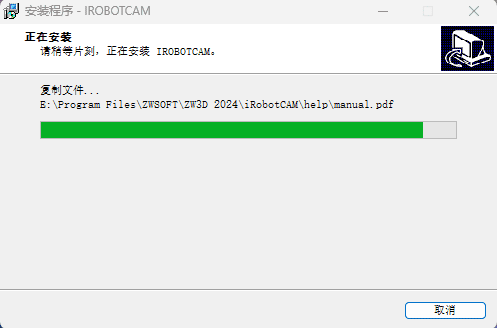
- 点击完成即安装包安装成功。如图所示:
- 安装完成之后来到桌面双击运行中望3D 2024程序。首次运行,会有一些默认设置。如下图所示:
- 双击进入中望3D界面,在“IROBOTCAM”模块下,点击激活。如下图所示:
- 次安装“IROBOTCAM-V1.0-plugins-for-ZW3D2024.exe”安装包,可以有效期试用30天,试用到期后需要激活才可继续使用。
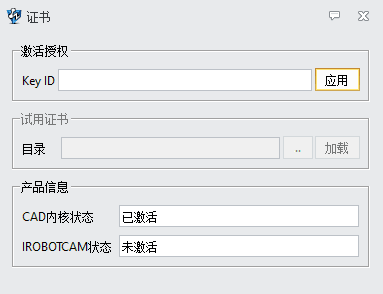
首次安装完成本产品安装包后,在“证书”窗口下,在“IROBOTCAM状态”栏,会显示试用版,即可试用,若安装过本产品安装包会显示未激活,需要激活授权才可使用。如下图所示:
激活授权方法:在证书界面激活授权上Key ID栏拷贝或输入越擎机器人模块激活码(激活码中“-”不可省略),输入完成点击应用按钮,IROBOTCAM状态会显示“已激活”状态。
- 安装完成。
第二章 产品功能
iRobotCAM致力于打造开放的机器人数字化加工平台,提供集产线机电概念设计、机器人加工编程仿真、虚拟调试等一体的数字化解决方案。具备可靠的物理仿真引擎,能够实现虚拟调试与实际工作站的联调。具有便捷的工艺集成模块,可快速集成定制化的工艺模块。基于国产工业软件平台中望3D, 构建机电设计与产线设计方案,机器人焊接、机器人喷涂等解决方案,不断提升工业机器人的应用价值。
2.1 机器人产线设计
- 机器人工作站单元设备库,从中导入不同厂家的机器人、工件、工具手、附加轴(导轨、变位机、龙门架等)及其它相关工作单元(地板、安全栏、控制柜等)。
- 虚拟传感器建模,气缸组件建模,卡爪组件建模,传送带组件建模。
- 工作单元布局,精确控制导入工作单元的设备的位置布局、位姿关系。
2.2 机电一体化设计
机电一体化设计,通过定义几何体为刚体、碰撞体,真实还原几何体的质量、惯性、摩擦、材料、碰撞等物理属性,创建运动副与约束、传感器与执行器、仿真序列、信号适配器,进而实现模型的物理仿真。
2.3 机器人离线编程
- 机器人示教,在基坐标系、工具坐标系等进行关节空间、直角空间的机器人示教作业。
- 机器人插补算法,包括直线、圆弧、关节等几种基本的插补算法。
- 机器人作业仿真运行,实际动画演示过程。
2.4 机器人虚拟调试
具备虚拟调试与虚拟监控,可实现虚拟机器人系统工作站与实际机器人系统工作站动作同步;支持多机器IO通信模拟仿真,支持多机器人同步,机器人多轴联动规划。
第三章 用户界面
3.1 原始界面
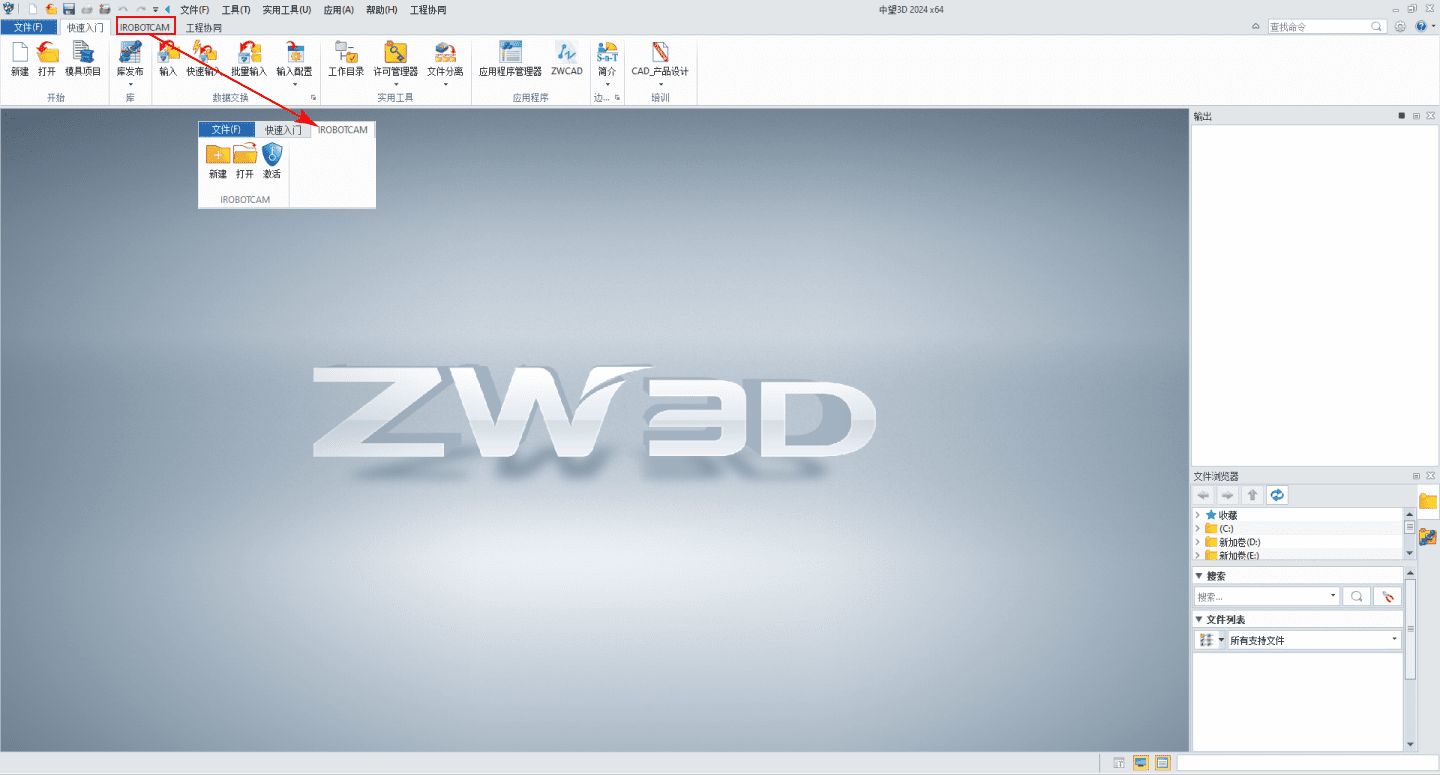
进入中望3D界面,在初始环境中找到“IROBOTCAM”模块,包含新建、打开和激活按钮。如下图所示:
3.2 新建工程文件
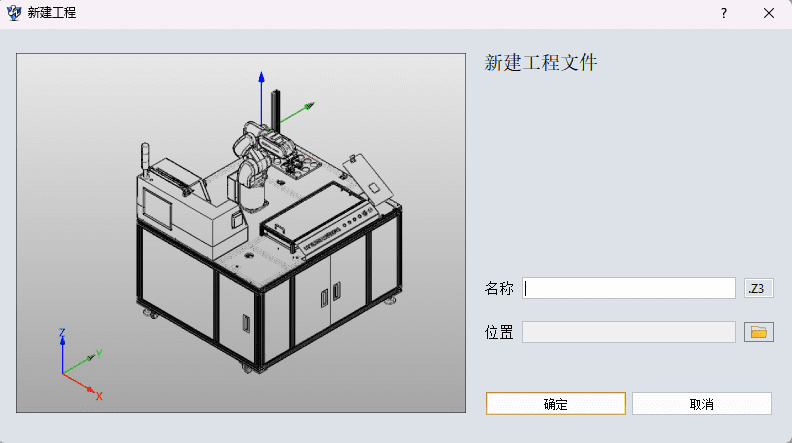
在“IROBOTCAM”模块下,点击新建,可以“新建工程文件”。如下图所示:
3.3 组件库
在“IROBOTCAM”工具栏,最左侧第一位置。如下图所示:

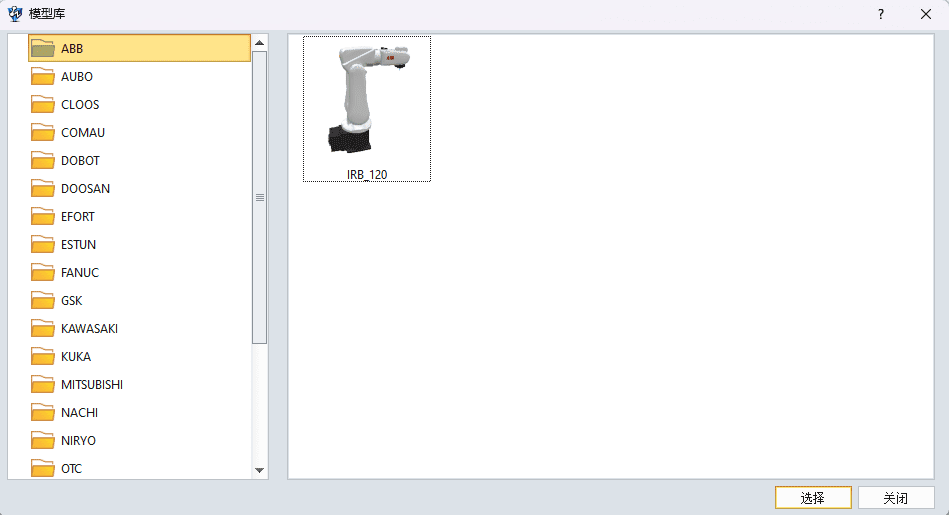
组件库:包含不同型号的机器人模型和机器人工具。如下图所示:
3.4 机电建模
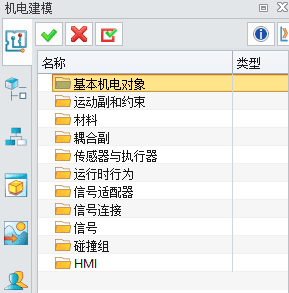
在“机电建模”选项栏,可以给模型添加基本机电对象(刚体、碰撞体)、运动副和约束(铰链副、滑动副),材料,添加传感器与执行器(位置控制、传送面、运动阵列单元、碰撞传感器、机器人、外部轴、关节位置、机器人工具等),添加仿真序列,添加信号适配器、信号、信号连接和碰撞组等。主要功能展示如下图所示:
-
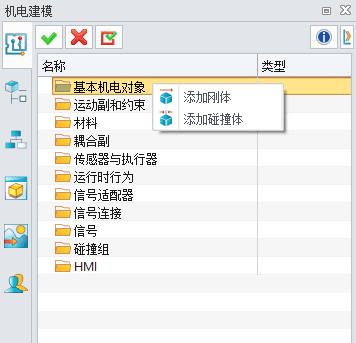
基本机电对象
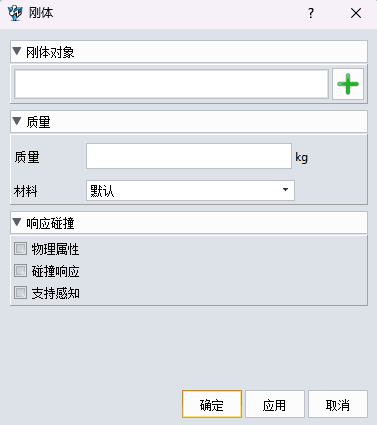
- 刚体:可使几何对象在物理系统的控制下运动,任何几何对象只有添加了刚体组件才能收到重力或者其他作用力影响。
物理属性:使刚体有质量作用且对力有响应。碰撞响应:在处理任务时与环境或其他物体发生碰撞。支持感知:物体支持被感知。界面如下图所示:
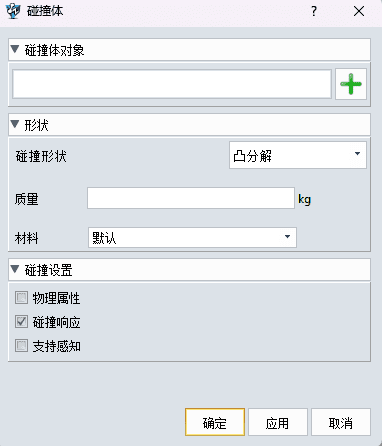
- 碰撞体:碰撞体是物理组件的一类,与刚体一起添加到几何对象上才能触发碰撞,定义元件与其他碰撞元件的碰撞方式,在物理模拟中,没有碰撞体的刚体会彼此相互穿过。
碰撞形状:凸包计算速度很快,会包络,精度会差一点、凸分解是分解成很多小的包络来拟合模型,凸分解时间会变慢但是非常精准。
碰撞材料:定义碰撞中材料的基本特性。
- 刚体:可使几何对象在物理系统的控制下运动,任何几何对象只有添加了刚体组件才能收到重力或者其他作用力影响。
-
运动副和约束:
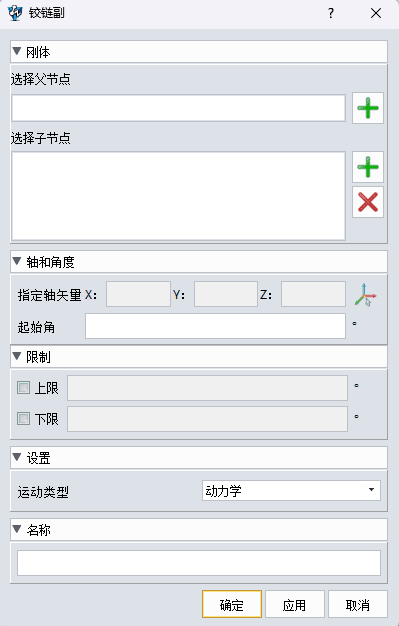
- 铰链副:在两个物体之间建立一个运动副,允许一个绕某一个轴旋转的自由度。
父节点:选择与连接件连接的另一刚体,子节点:选择需要添加铰链约束的刚体。
指定轴矢量:指定旋转轴,起始角:在模拟仿真还没有开始之前连接件相对于基本件的角度。如下图所示:
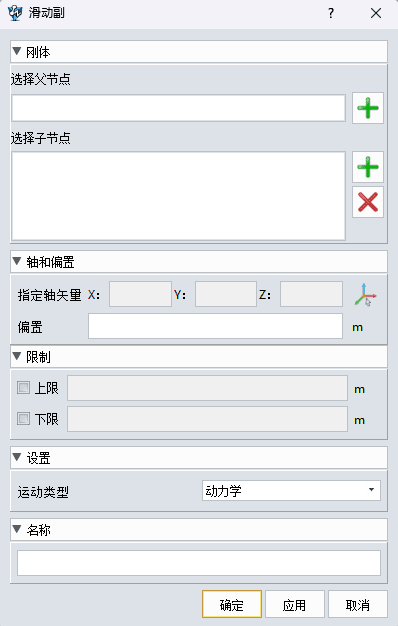
- 滑动副:组成运动副的两个构件之间只能按照某一方向作相对移动的运动副,滑动副具有一个平移的自由度。
偏置:在模拟仿真还没有开始之前连接件相对于基本件的距离。如下图所示:
- 铰链副:在两个物体之间建立一个运动副,允许一个绕某一个轴旋转的自由度。
-
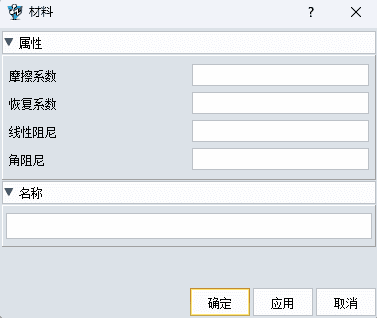
材料
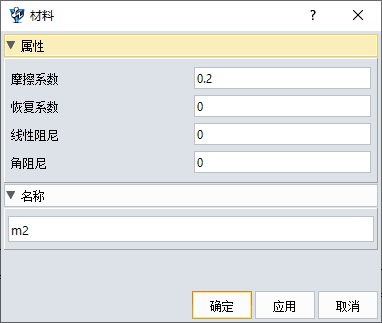
碰撞材料输入摩擦系数和恢复系数等,使物体具备摩擦力等,从而可以更加形象的模拟出物体的仿真形态。如下图所示:
-
传感器与执行器(需要修改)
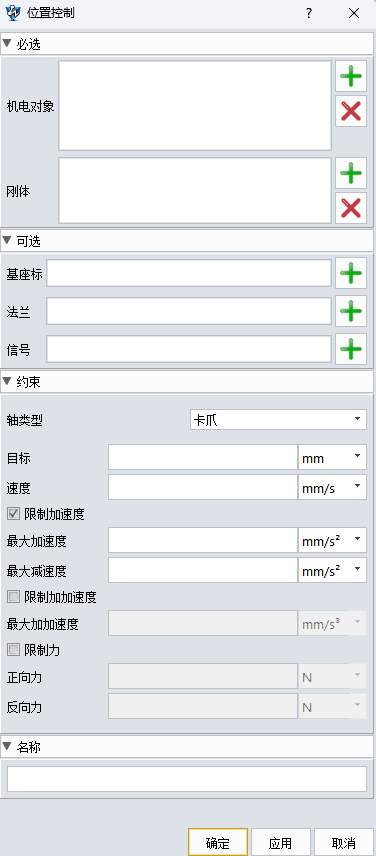
- 位置控制:命令创建一个执行器,驱动一个运动副定义的轴以预设的恒定速度移动到预设的位置。轴类型-气缸-角路径选项:用于定义轴运动副的旋转方案。目标:指定一个目标位置。速度:指定一个恒定的速度。基座标:由机器人底座基点和坐标位置组成,是机器人其他坐标系的基础。如下图所示:
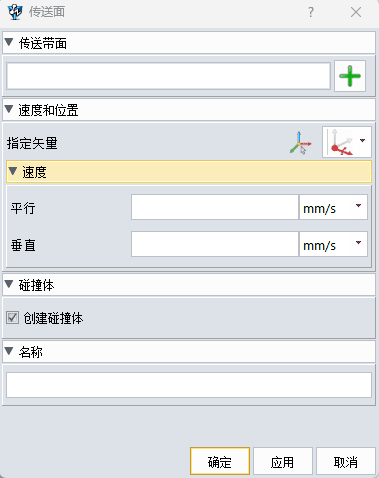
- 传输面: 是一种物理属性,将所选的平面转化为传送带。指定矢量:指定传输面的传输方向。平行:指定在传输方向上的速度大小。垂直:指定在垂直于传输方向上的速度大小。如下图所示:
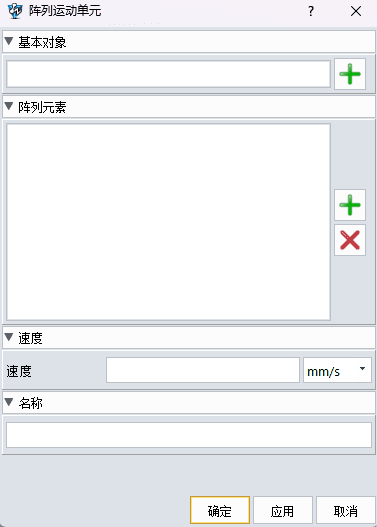
- 运动阵列单元:添加运动阵列单元,选择基本对象,阵列元素,添加速度,可将其模拟传送带运行。如下图所示:
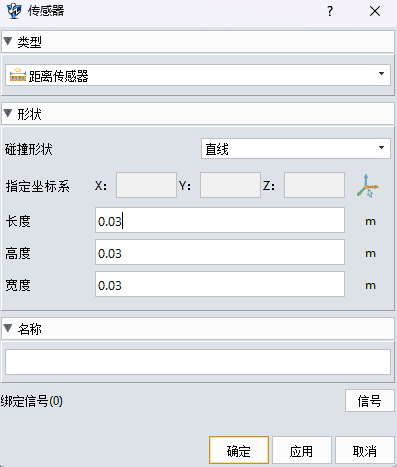
- 传感器:默认距离传感器,用该传感器来收集碰撞事件。碰撞形状的尺寸:长度、高度、宽度取决于碰撞形状的类型。如下图所示:
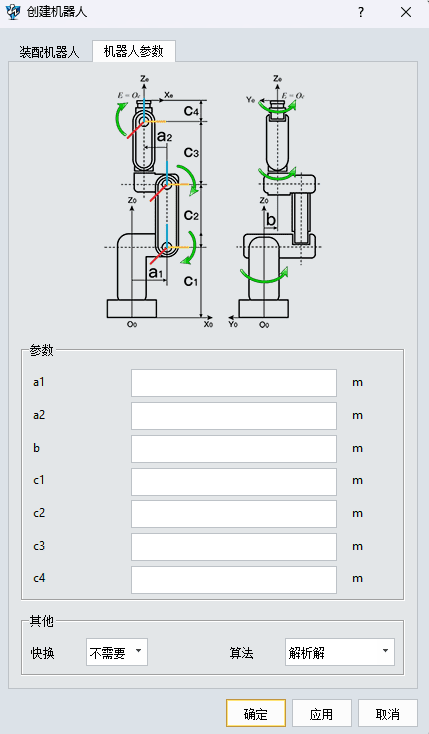
- 机器人:添加关节运动副、基座标、法兰坐标、机器人参数等来创建机器人。如下图所示:

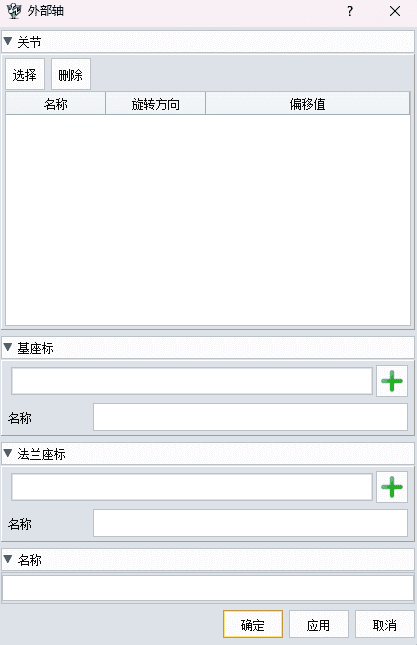
- 外部轴:添加外部轴,通过选择关节、底座、基座标、法兰坐标,使机器人可以在上面进行运动。如下图所示:
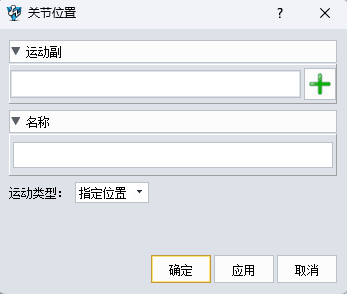
- 关节位置:添加关节位置,选择运动副,输入类型和速度,建立内部信号。如下图所示:
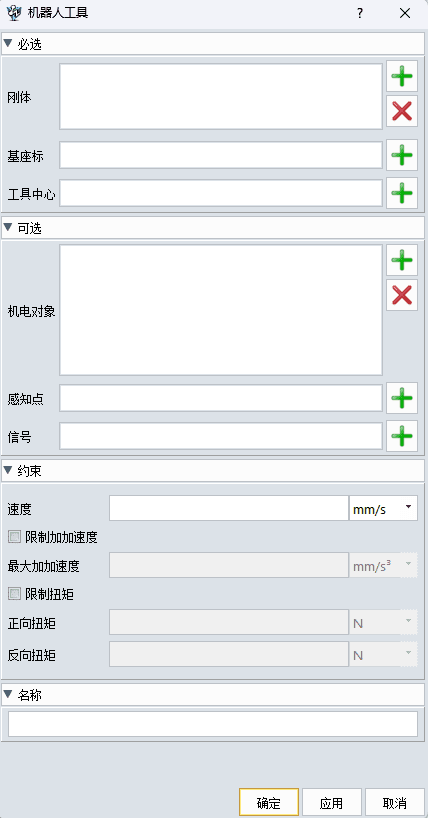
- 机器人工具:添加关节运动副、基座标、法兰坐标、机器人参数等来创建机器人。如下图所示:
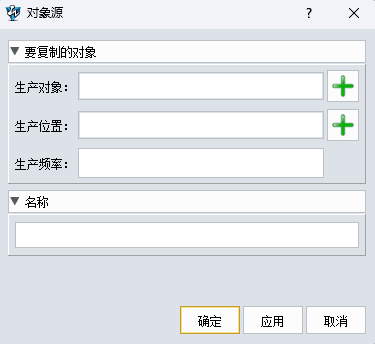
- 对象源:利用对象源在特定时间间隔创建多个外表、属性相同的对象。如下图所示:
-
运行时行为
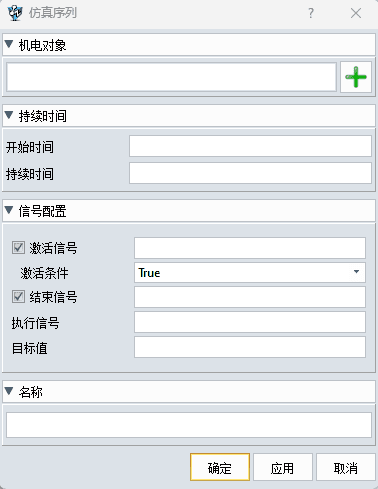
即仿真序列:是逻辑控制与仿真验证的快捷方式,可将各个执行器与传感器相关联,从而实现逻辑控制。如下图所示:
- 信号适配器
使用其命令封装运行时公式和信号,包含在“机电建模”窗口信号下,创建信号对象,可以使用该信号来连接外部信号。
公式:将在公式框中显示的公式分配给选定的信号。如下图所示:

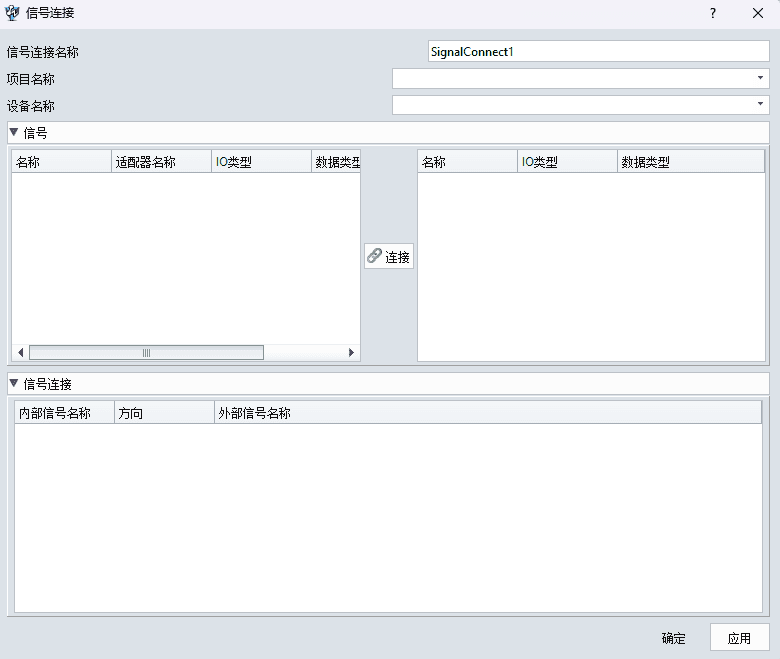
- 信号连接
将内部信号和外部信号进行信号连接,通过外部设备上的外部信号来控制内部信号查看机器人仿真效果。如下图所示:
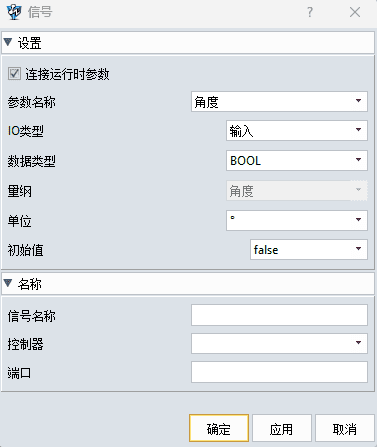
- 信号
分成输出信号和输入信号,通过创建不同的信号,使机器人产生不一样的仿真运动形式。如下图所示:
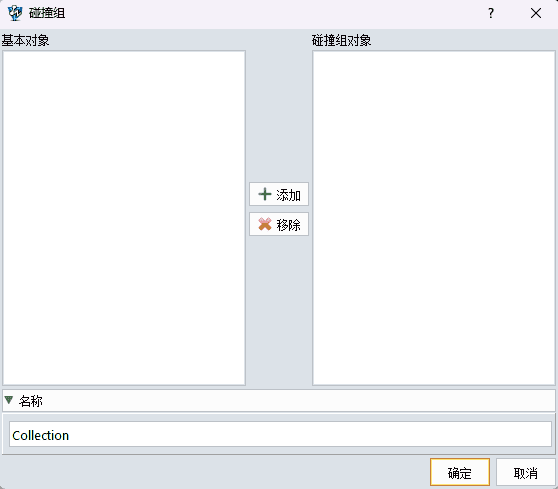
- 碰撞组
添加基本对象和碰撞对象创建碰撞对。用于碰撞检测。如下图所示:
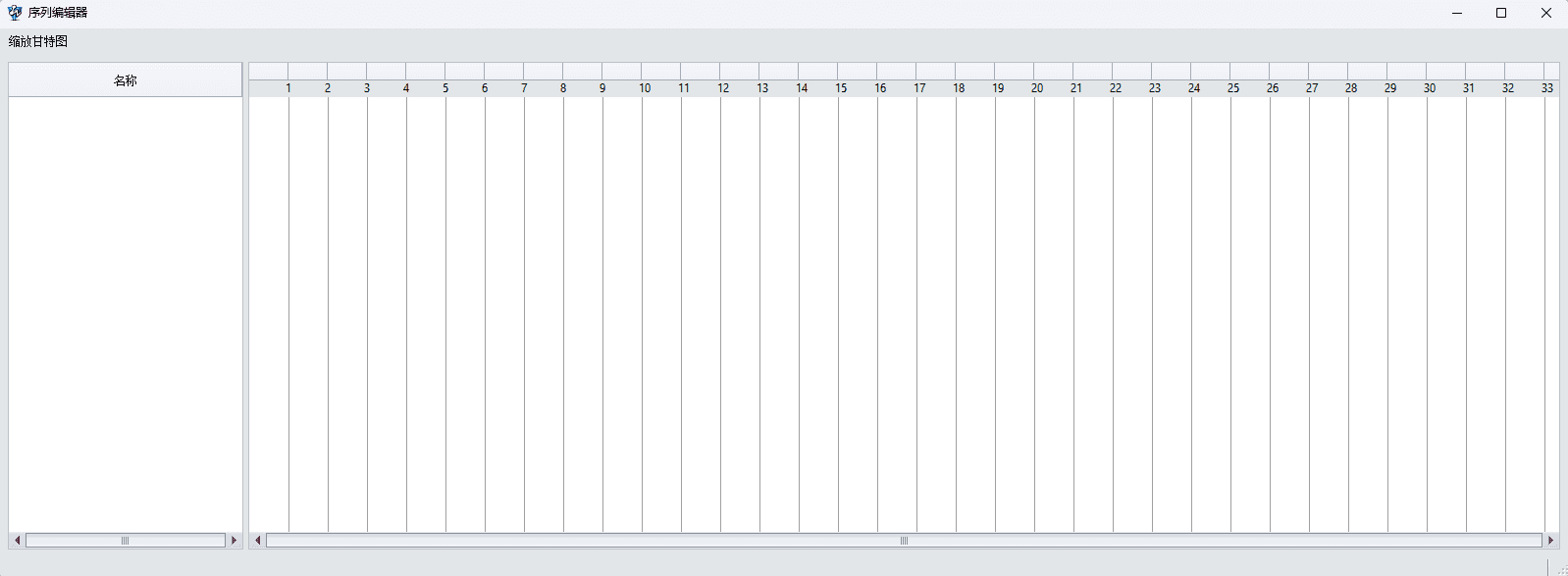
3.5 甘特图
仿真序列添加完成后,进行仿真验证,仿真序列会在甘特图中展示出实时的序列时间。如下图所示:
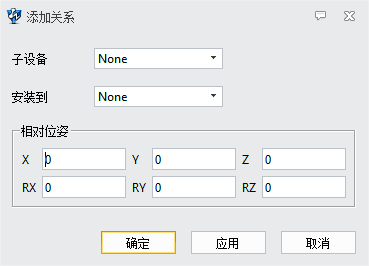
3.6 父子关系
添加父子关系,选择子设备安装到父设备,可以调正位姿,使子设备可以和父设备进行紧密的贴合。如下图所示:
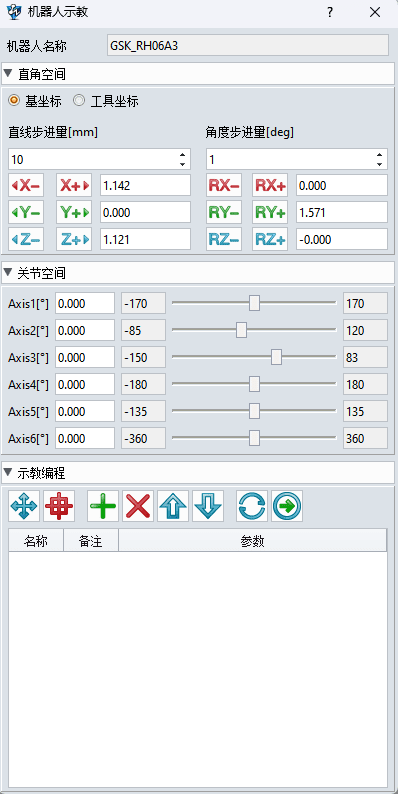
3.7 示教编程
基于3D模型操控机器人的直角空间和关节空间,添加标记点。如下图所示:
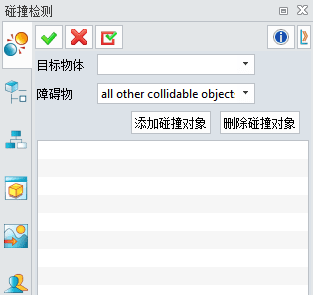
3.8 碰撞检测
通过添加碰撞组,再添加碰撞对,可以看到机器人和物体之间进行碰撞检测,以高亮的形式显示出来。如下图所示:
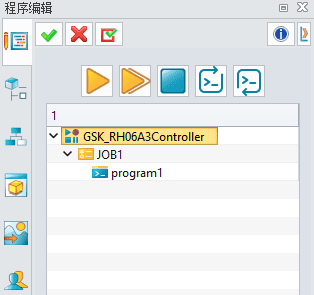
3.9 程序编辑
在“程序编辑”窗口,添加JOB程序,添加程序program1,然后右键编辑程序。如下图所示:
在“程序参数”窗口,进行添加命令。如下图所示:
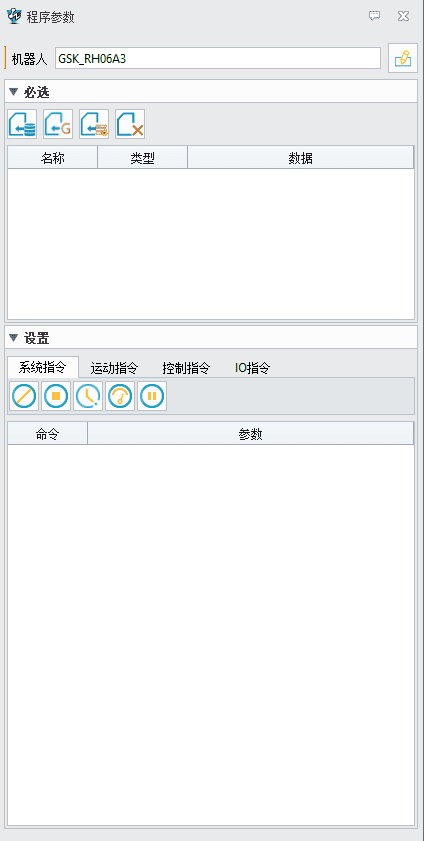
通过添加指令,控制机器人运动。程序指令有以下分类:
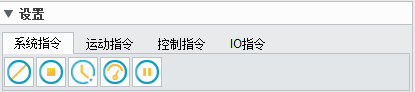
3.9.1 系统指令
NOP(空指令,不做任何操作)、END(程序结束指令,出现后程序停止,后面就算还有指令也不再运行)、WAIT(系统等待指令,单位为ms)、SPEED、PAUSE(系统停止指令,当程序运行到该指令时,系统停止不再运行)。如下图所示:
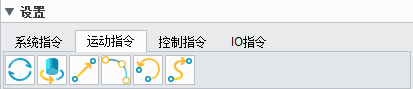
3.9.2 运动指令
包括:MOVJ、MOVL、MOVA、MOVC等。如下图所示:
注意事项:对于每个loc点位只能使用一种运动指令,否则可能会造成机器人运动轨迹错误;如果需要同一个点位使用多次,请将该点位用以不同的名称多次标记。
-
HOME
- 功能: 以关节插补运动方式让机器人回到零点。
- 格式: 直接点击HOME键即可。
- 说明: HOME使用时只能直接添加,而不能采用插入指令的方式添加运动指令。
-
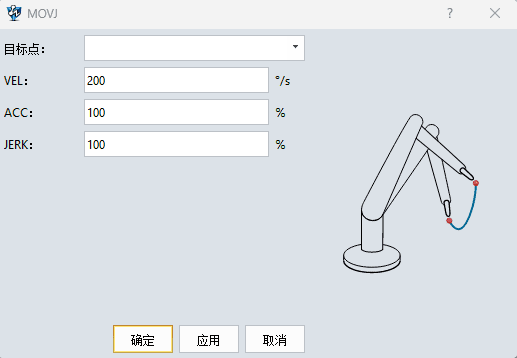
MOVJ
- 功能: 以关节插补方式移动到目标点。
- 格式: MOVJ{LOC(目标点),VEL[ ](速度),ACC[ ](加速度),JERK[ ](加加速度)}。
- 说明: VEL的单位是°/s;ACC和JERK均采用百分比形式,输入范围是一个正数,小于等于0会报错;如下图所示:
-
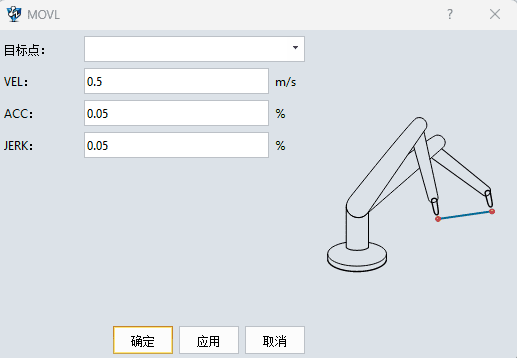
MOVL
- 功能: 以直线插补方式移动到目标点。
- 格式: MOVL{LOC(目标点),VEL[ ](速度),ACC[ ](加速度),JERK[ ](加加速度)}。
- 说明: VEL的单位是m/s;ACC和JERK均采用百分比形式,输入范围是一个正数,小于等于0会报错;如下图所示:
-
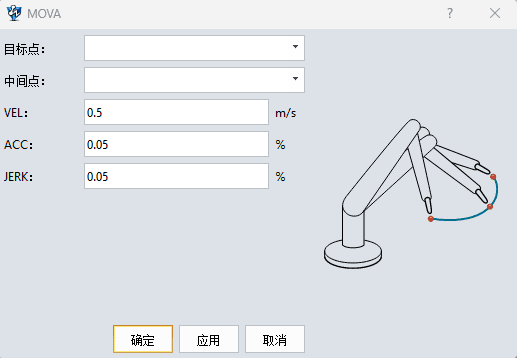
MOVA
- 功能: 圆弧插补运动方式经由中间点到目标点。
- 格式: MOVA{LOC1(目标点),LOC2(中间点),VEL[ ](速度),ACC[ ](加速度),JERK[ ](加加速度)}。
- 说明: VEL的单位是m/s;ACC和JERK均采用百分比形式,输入范围是一个正数,小于等于0会报错;如下图所示:
-
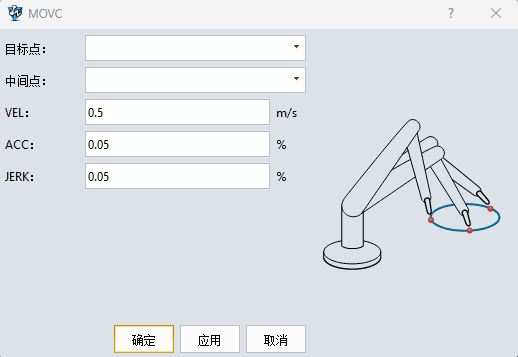
MOVC
- 功能: 以圆周插补运动的方式沿着当前点与目标点和中间点三点构成的圆周运动一周后回归当前位置,且运动时先经过目标点,再经过中间点。
- 格式: MOVC{LOC1(目标点),LOC2(中间点),VEL[ ](速度),ACC[ ](加速度),JERK[ ](加加速度)}。
- 说明: VEL的单位是m/s;ACC和JERK均采用百分比形式,输入范围是一个正数,小于等于0会报错;如下图所示:
-
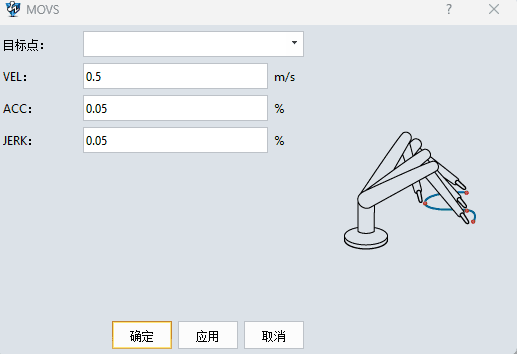
MOVS
- 功能: 以样条插补运动方式运动到目标点。
- 格式: MOVS{LOC(目标点),VEL[ ](速度),ACC[ ](加速度),JERK[ ](加加速度)}。
- 说明: VEL的单位是m/s;ACC和JERK均采用百分比形式,输入范围是一个正数,小于等于0会报错;如下图所示:
3.9.3 控制指令
控制指令包括如下12条指令,如下图所示:
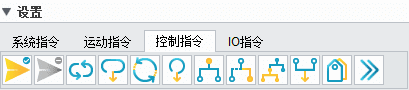
- FLYBY#ON:平滑过渡的开启指令
- FLYBY#OFF:平滑过渡的关闭指令
- LOOP:循环开始指令,该指令后面直到END_LOOP指令的部分循环设置的次数,该指令END_LOOP组合使用
- END_LOOP:循环结束指令,与LOOP配对使用
- WHIL:while循环开始指令,参数为循环开始条件,是一个条件判断语句,与END_WHILE搭配使用
- END_WHILE:WHILE循环内容结束指令,与WHILE搭配使用
- IF:选择结构指令,参数为条件语句,IF后的指令为满足该条件可以执行的指令,直到遇到ELSE, ELSE_IF或者END_IF结束该分支内容
- ELSE:IF或ELSE_IF语句的另一选择分支,以END_IF为该分支语句的结尾
- ELSE_IF:用于多重分支结构中的分支开始指令,以ELSE为该分支语句结尾
- END_IF:用于所有条件语句的结束,与IF相配对
- LABEL:在指定位置构建一个标签,该标签与GOTO指令共同使用可以达到调整指令进程的目的
- GOTO:跳转到LABEL标记的指令位置开始执行,一般不跳转到前面的标签,容易形成死循环
3.9.4 IO指令
IO指令包括如下四个部分,如下图所示:
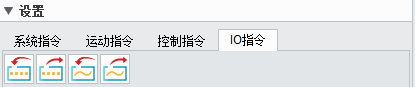
- DIN: 数字量输入,读取指定端口号的信号到BOOL型变量中
- DOUT: 数字量输出,依据读取的信号对控制器做不同的响应
- AIN
- AOUT
3.10 通信模块
通过添加设备,访问到设备服务器,通过服务器的外部信号控制内部信号,依次达到通信功能。如下图所示:
3.11 仿真验证
编程后可进行仿真验证,演示机器人运动轨迹。切换到实时模式进行机电运动仿真模拟。如下图所示:

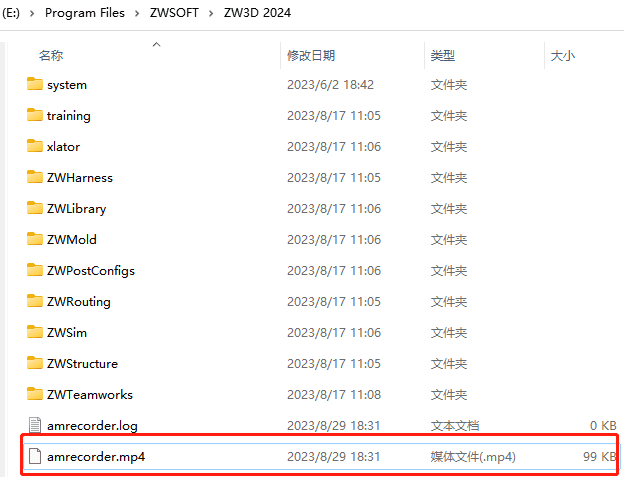
3.12 录屏功能
在“IROBOTCAM”选项卡中点击仿真按钮,打开”仿真控制”界面,勾选开启视频录制,然后点击“仿真控制”窗口最左侧的开始仿真按钮即开始录制,等待机器运行整个过程,最后点击然后点击“仿真控制”窗口最右侧的结束仿真按钮即结束录制,视频录制完成。如下图所示:

视频录制存放位置:打开中望3D 2024软件安装位置,上拉即可看到视频录制文件,点击视频MP4文件,即可看到机器运行整个过程。如下图所示:
第四章 应用案例
-
注意事项: 在“IROBOTCAM”选项卡操作的内容无法使用部分快捷键。例如:ctrl+s(保存)、ctrl+z(撤销)等,可以使用ctrl+x(剪切)、ctrl+c(复制)、ctrl+v(粘贴)。
-
保存方法:(以下是一种常用的保存方法,当在“IROBOTCAM选项卡”对模型进行了操作,其余方式用户可以自行探索)
在“IROBOTCAM”选项卡下点击保存按钮。如下图所示:保存完成右侧输出框会显示“保存场景数据成功的英文”字样。如下图所示: 以下会出现两种形式的保存方法:一种是覆盖原先导入的文件保存,另一种是另存为一种新的文件。
以下会出现两种形式的保存方法:一种是覆盖原先导入的文件保存,另一种是另存为一种新的文件。
- 覆盖原文件:在“IROBOTCAM选项卡”下点击关闭按钮,会弹出关闭窗口,点击“是”,代表覆盖原先导入的文件进行保存。如下图所示:(保存是否成功会在右侧输出框进行文字显示。)
- 另存为新文件:点击完“保存按钮”成功后,点击工具栏的“文件”按钮。点击“文件框”下的保存,选择右侧框中“另存为”选项。如下图所示:(保存是否成功会在右侧输出框进行文字显示。)如下图所示:

-
案例文件存放位置
在中望3D 2024软件安装的,,点击以下路径,在iRobotCAM,下example文件夹和help文件夹中,里面涵盖该工程案例和使用手册PDF版。如下图所示:使用手册在软件界面的位置:进入“IROBOTCAM”选项卡中在最右侧点击帮助按钮即可弹出使用手册PDF版。如下图所示:

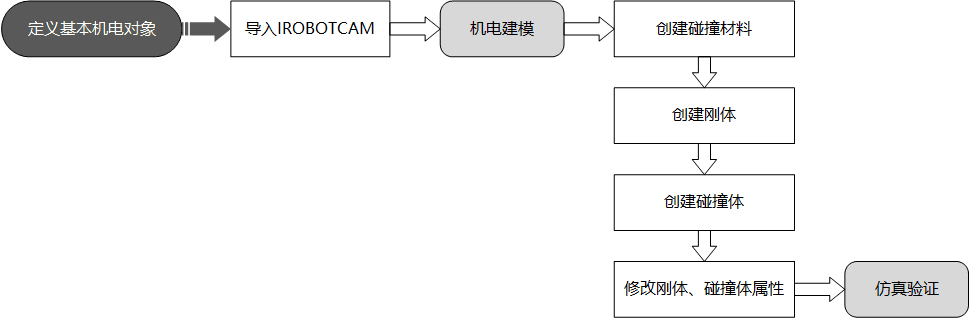
4.1 定义基本机电对象
-
步骤1:打开文件
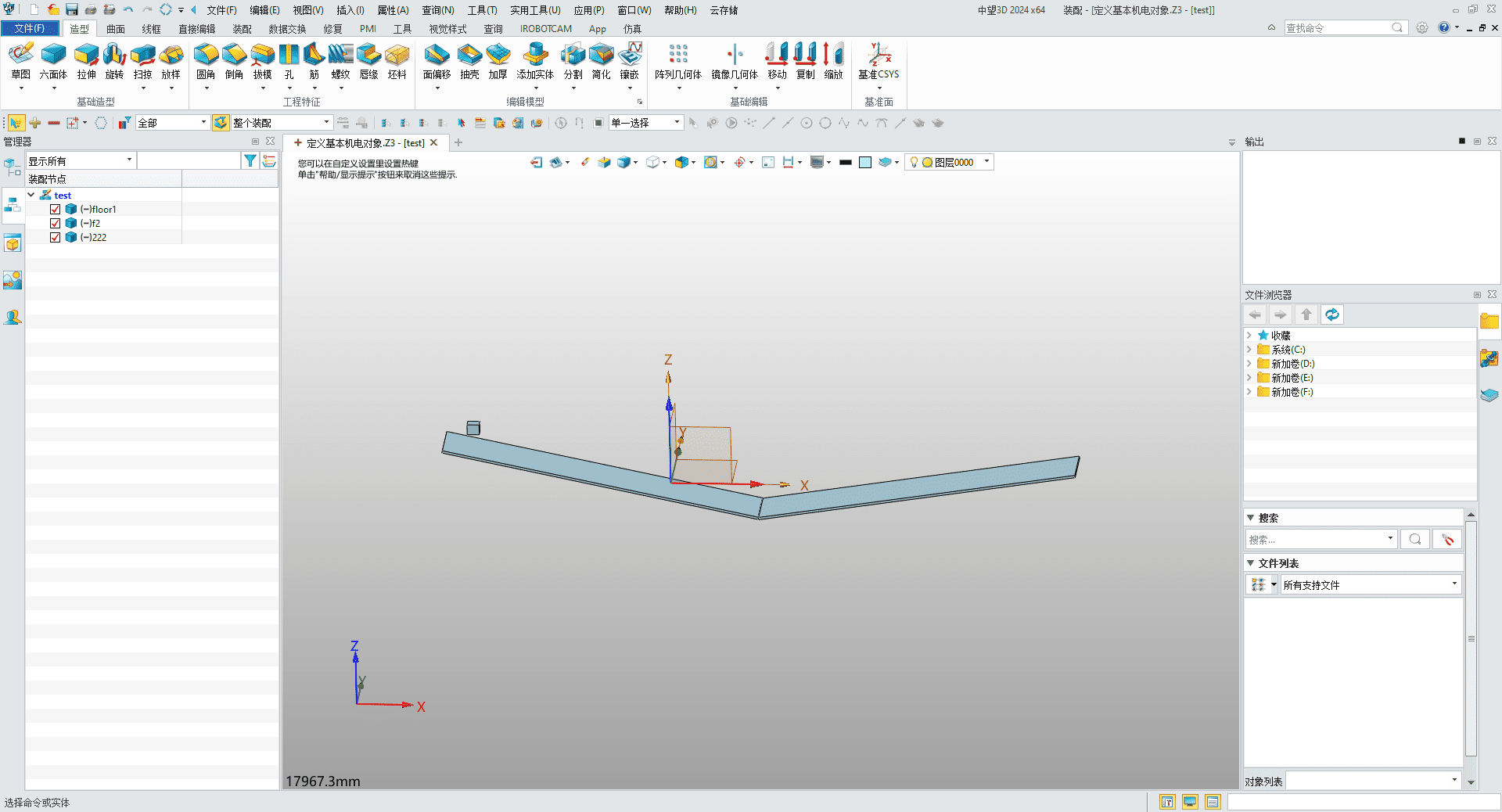
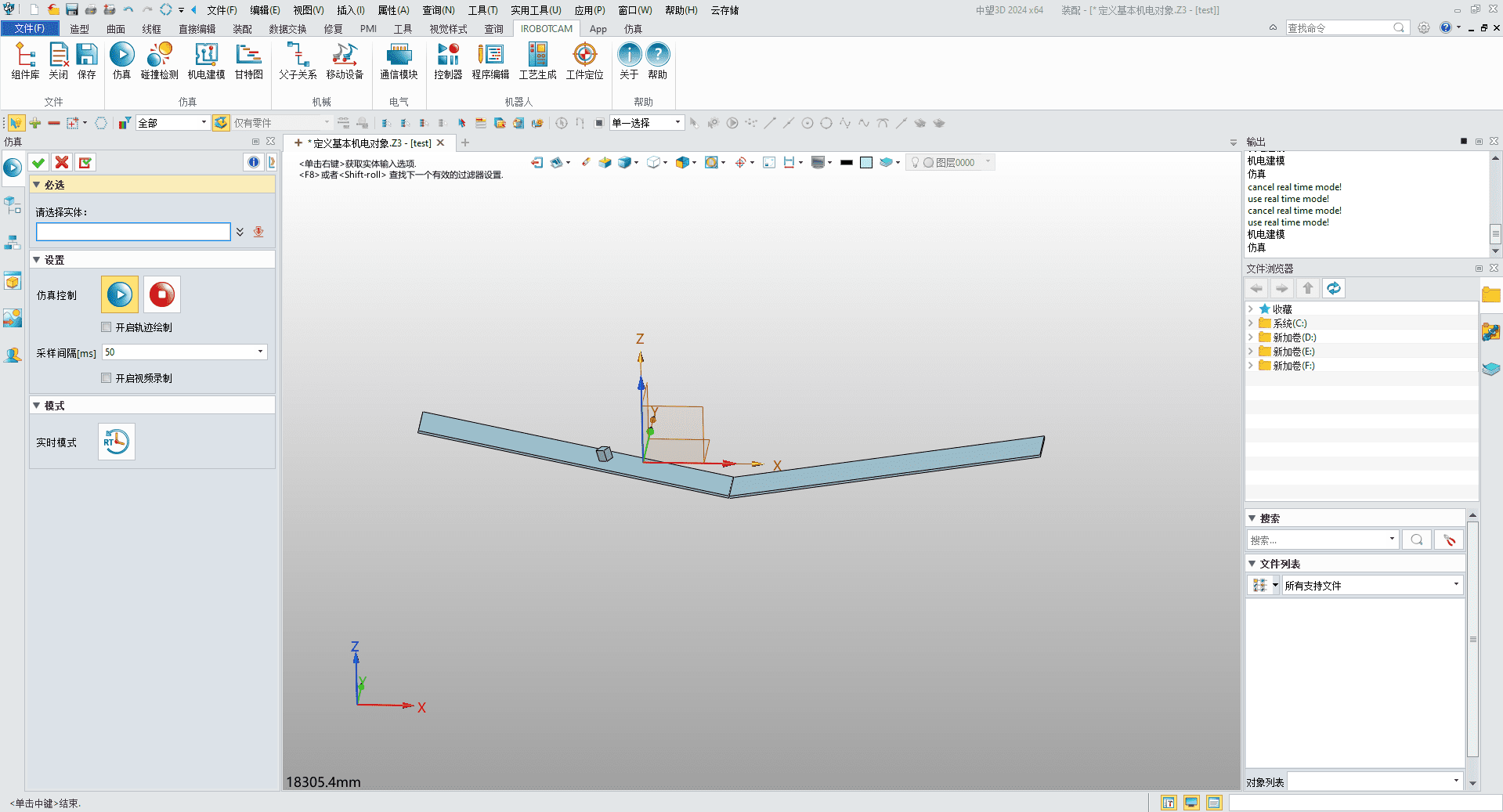
打开文件“ 定义基本机电对象.Z3”进入IROBOTCAM环境。如下图所示:双击“test”打开装配。如下图所示: 打开装配后界面如图所示,由三个组件构成。如下图所示:
打开装配后界面如图所示,由三个组件构成。如下图所示: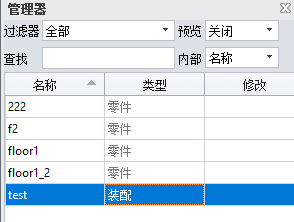
-
步骤2:创建碰撞材料
点击“IROBOTCAM选项卡”,进入机电建模界面。如下图所示:在“机电建模”窗口下,点击材料,右键选择添加材料。如下图所示: 为两个斜面创建碰撞材料m1。如下图所示:
为两个斜面创建碰撞材料m1。如下图所示: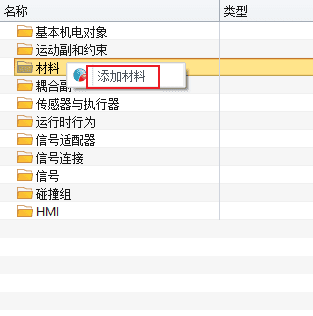 为物料创建碰撞材料m2。如下图所示。
为物料创建碰撞材料m2。如下图所示。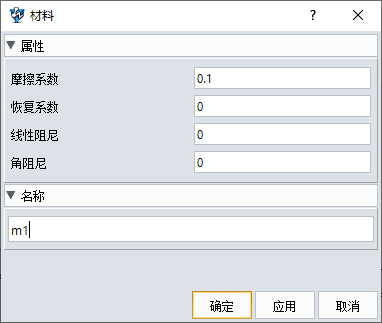
-
步骤3:创建刚体
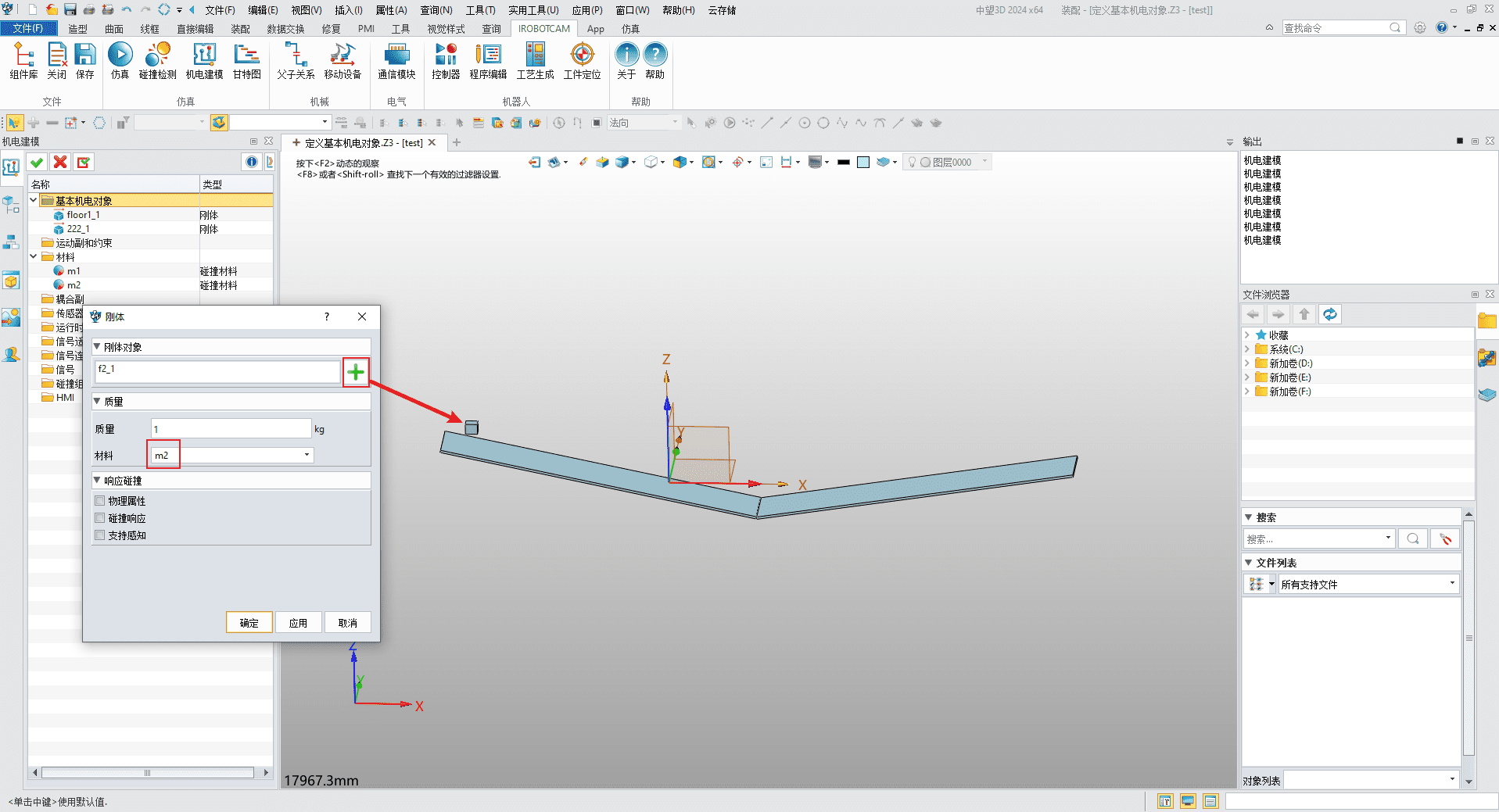
点击“基本机电对象”,右键选择添加刚体,打开“刚体”窗口。如下图所示:点击“+”按钮选择一个斜面组件创建刚体,质量为“1”,材料下拉选择“m1”,响应碰撞不勾选,点击确认,按照上述操作将另一个斜面添加为刚体。如下图所示: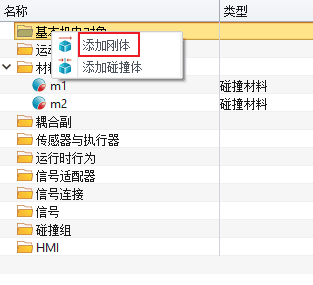 选择箭头所指“物料”创建刚体,输入质量为“1”,通过下拉列表选择前一步创建的材料“m2”(材料选择框空白意味着默认材料),响应碰撞勾选“物理属性”和“碰撞响应”。如下图所示:
选择箭头所指“物料”创建刚体,输入质量为“1”,通过下拉列表选择前一步创建的材料“m2”(材料选择框空白意味着默认材料),响应碰撞勾选“物理属性”和“碰撞响应”。如下图所示: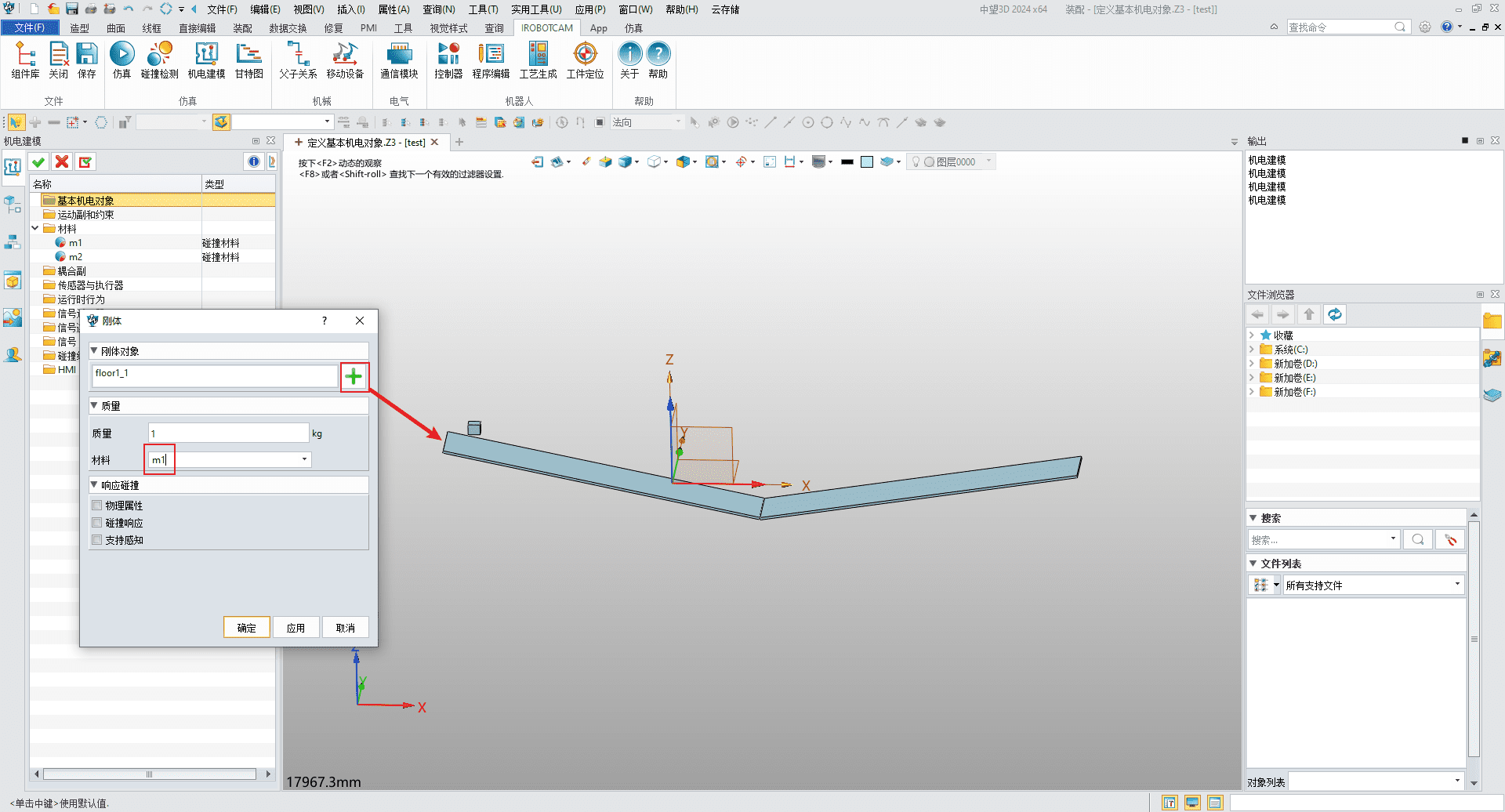
-
步骤4:创建碰撞体
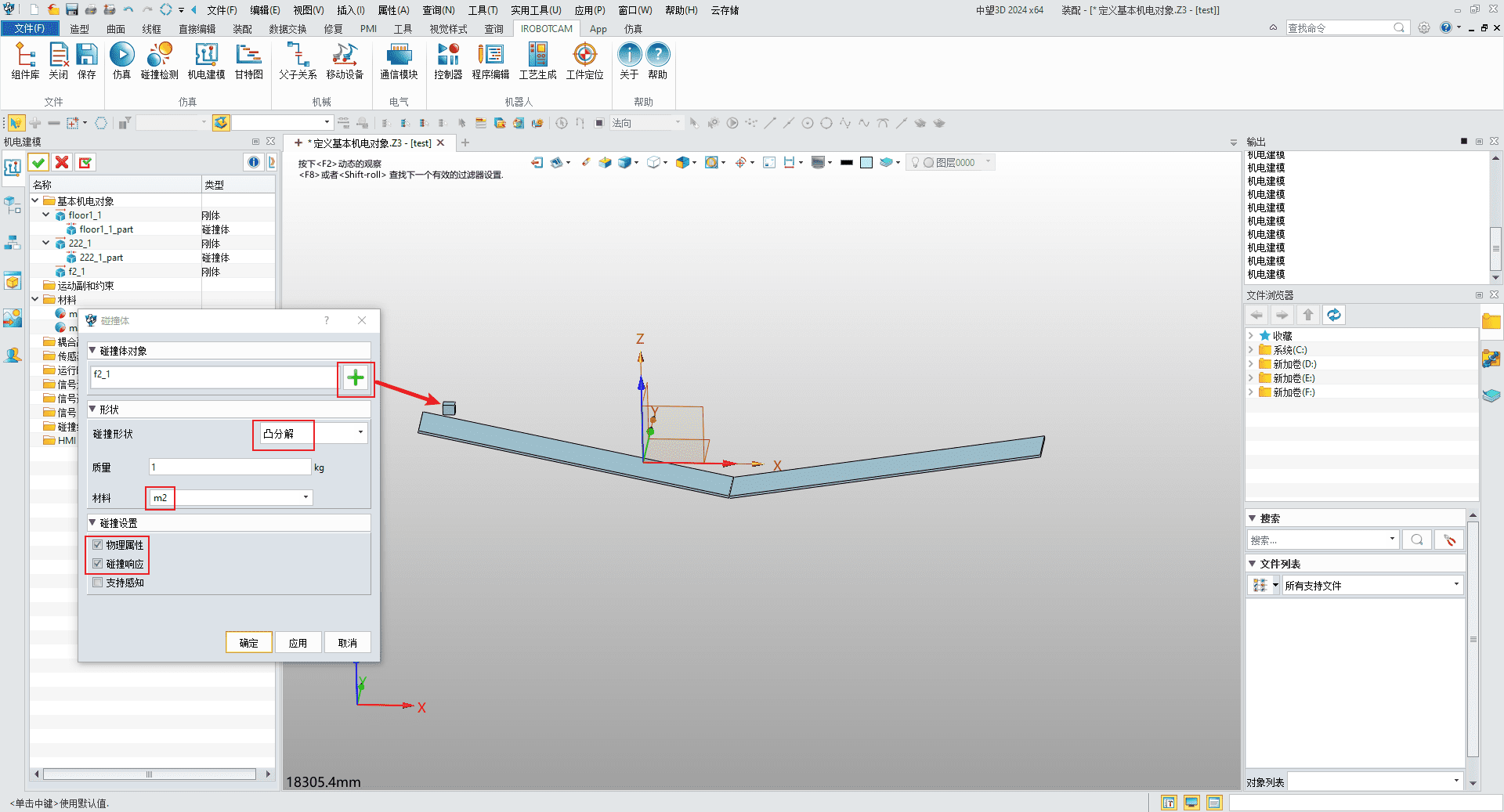
点击“基本机电对象”,右键选择添加碰撞体,打开“碰撞体”窗口,点击“+”按钮选择一个斜面,质量为“1”,碰撞形状选择“凸分解”,碰撞设置勾选“碰撞响应”,碰撞材料选择“m1”,按照上述操作说明对另一个斜面也创建碰撞体。如下图所示:点击“+”按钮,选择物料将其创建为碰撞体,碰撞形状选择“凸分解”,质量为“1”,碰撞设置勾选“物理属性”和“碰撞响应”,碰撞材料选择“m2”。如下图所示: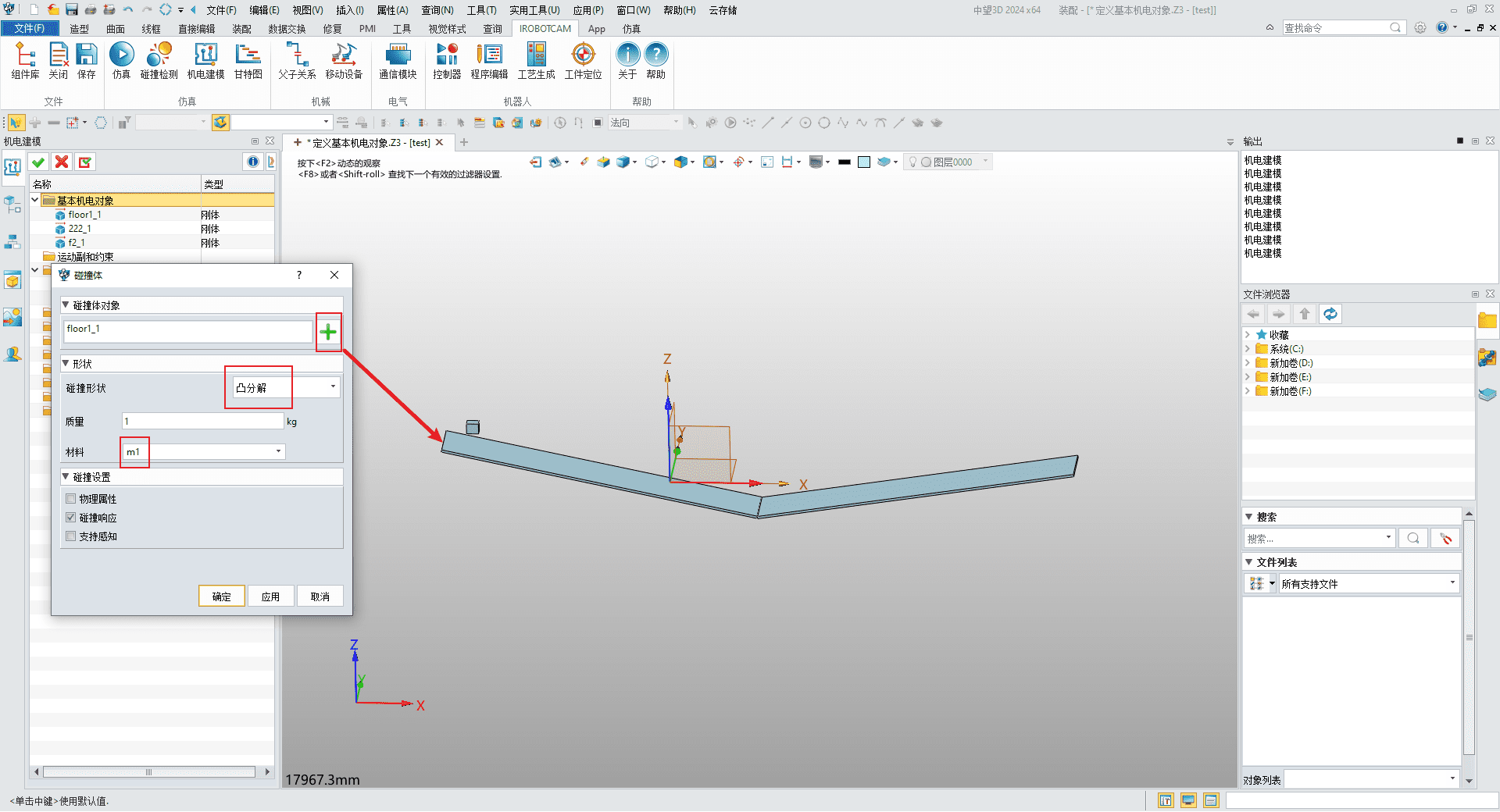
-
步骤5:查看机电建模的框架
材料、刚体、碰撞体都创建完成。如下图所示:
-
步骤6:仿真验证
在“IROBOTCAM选项卡”下,点击仿真按钮。如下图所示:在“模式”栏,点击“实时模式”切换到“实时仿真”。如下图所示: 切换到实时仿真,当前仿真模式见消息输出框提示“use real time mode”,如下图所示:
切换到实时仿真,当前仿真模式见消息输出框提示“use real time mode”,如下图所示: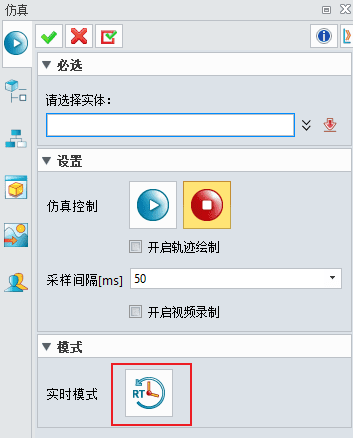 最后,点击“仿真控制”窗口最左侧的开始仿真按钮,即可看到物料在两块木板上缓缓移动,最后下落。如下图所示:
最后,点击“仿真控制”窗口最左侧的开始仿真按钮,即可看到物料在两块木板上缓缓移动,最后下落。如下图所示: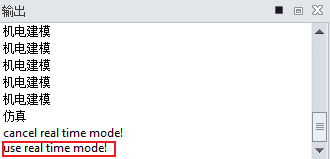
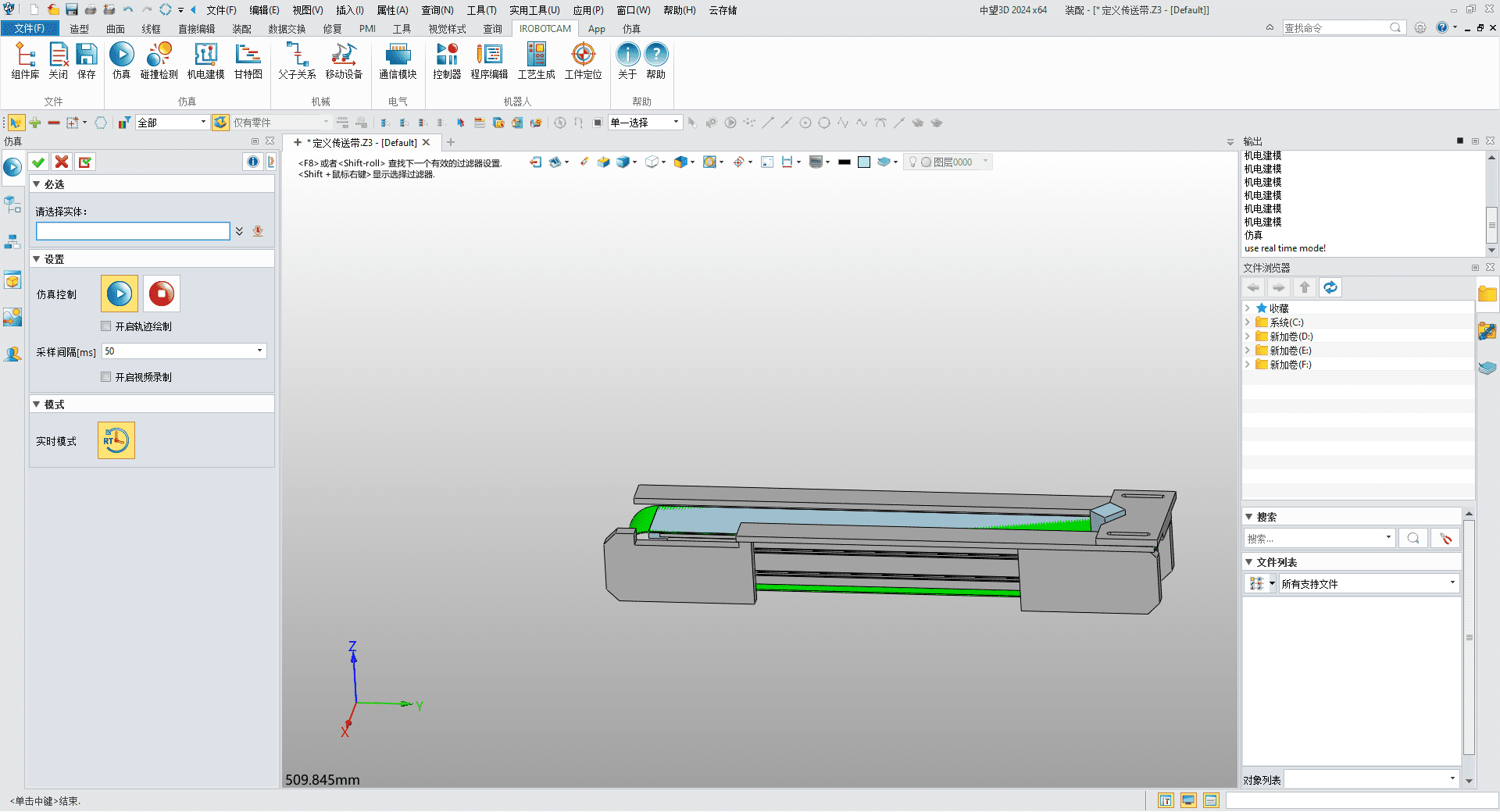
4.2 定义传送带

-
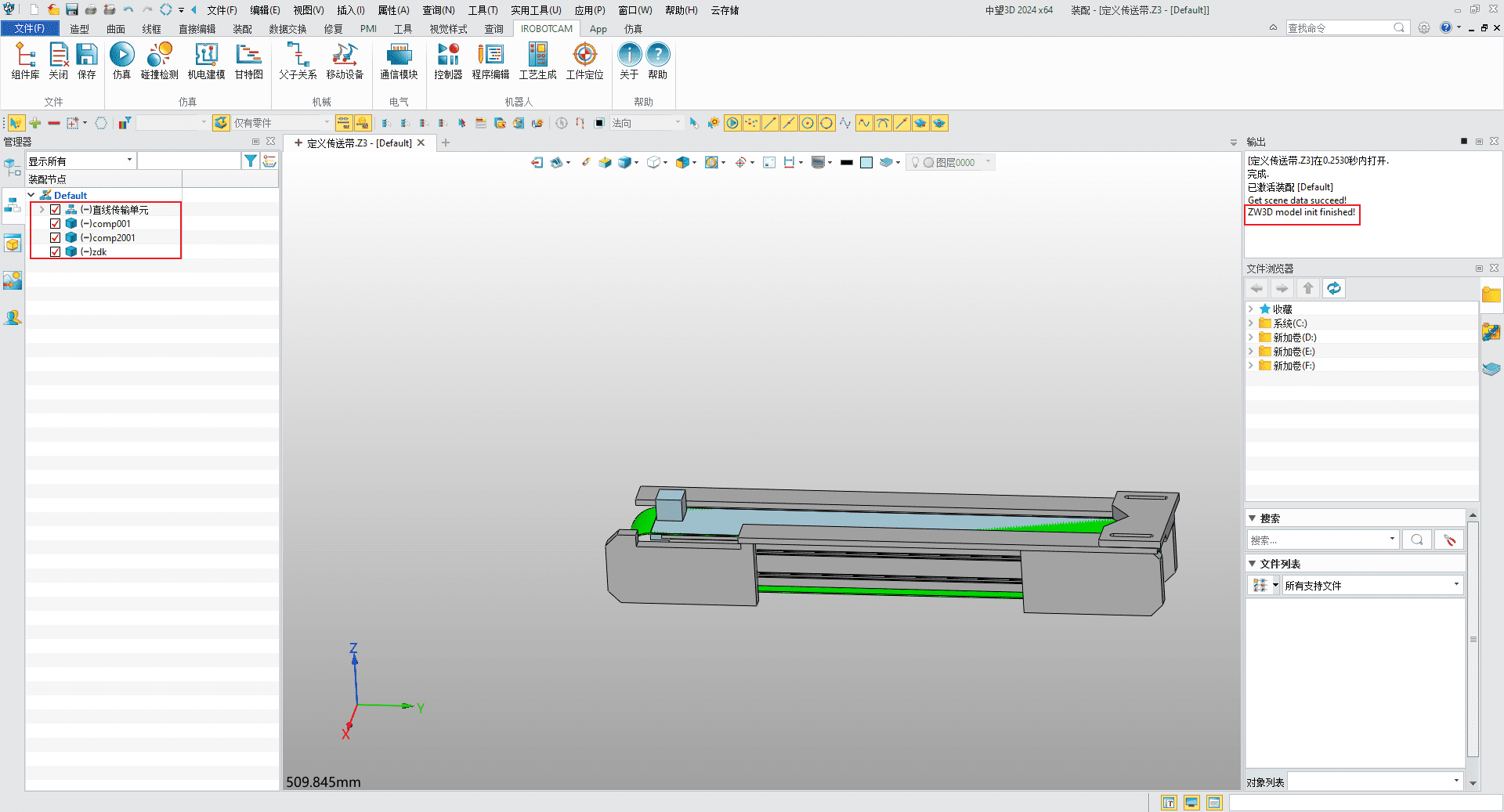
步骤1:打开文件
打开文件“定义传送带.Z3”进入IROBOTCAM环境。如下图所示:等待进入界面,输出框提示导入完成即可开始创作。如下图所示:
-
步骤2:创建刚体和碰撞体
在“IROBOTCAM选项卡”下,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“基本机电对象”,右键选择添加刚体。如下图所示:
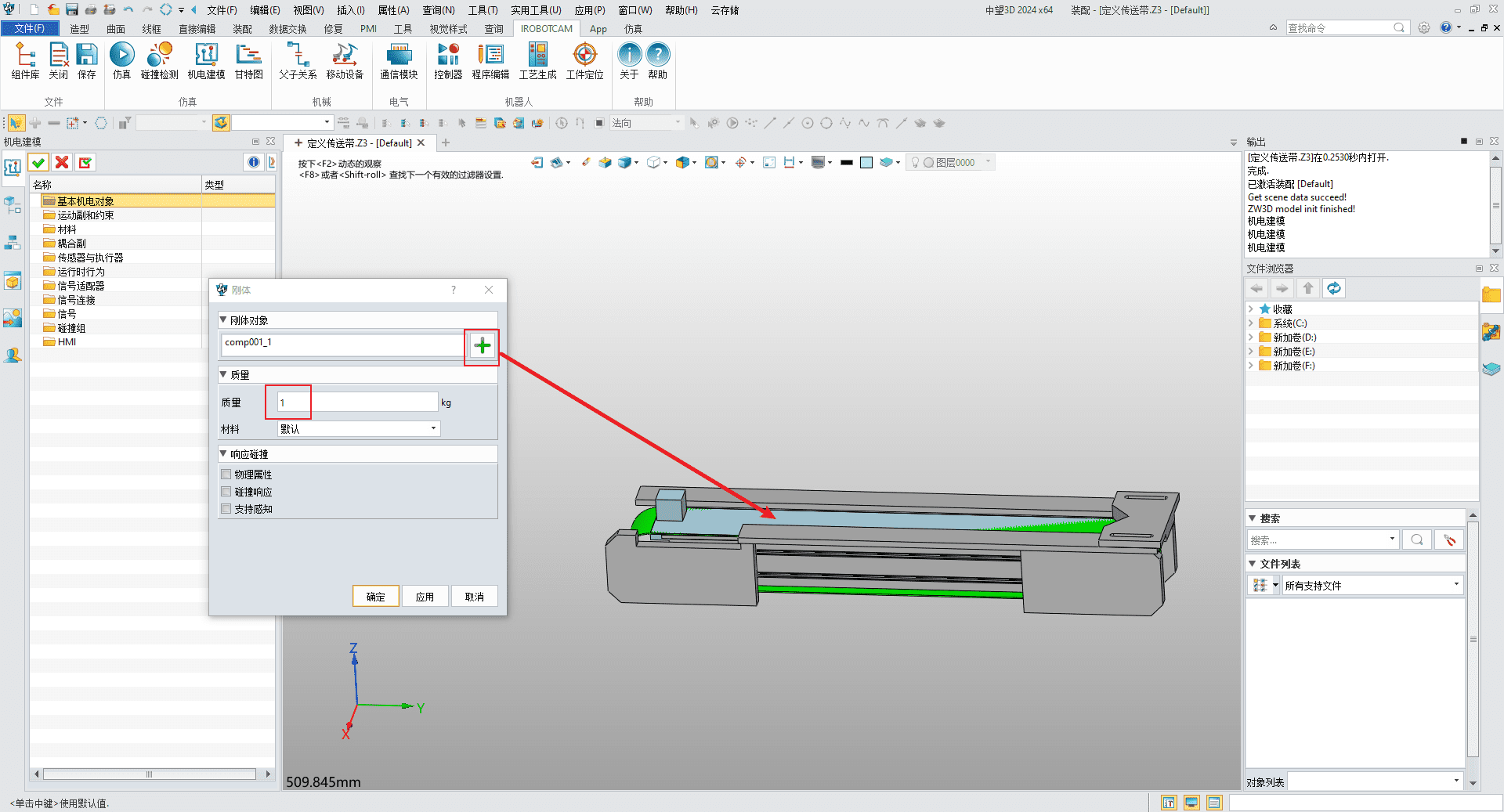
- 长木板companies:
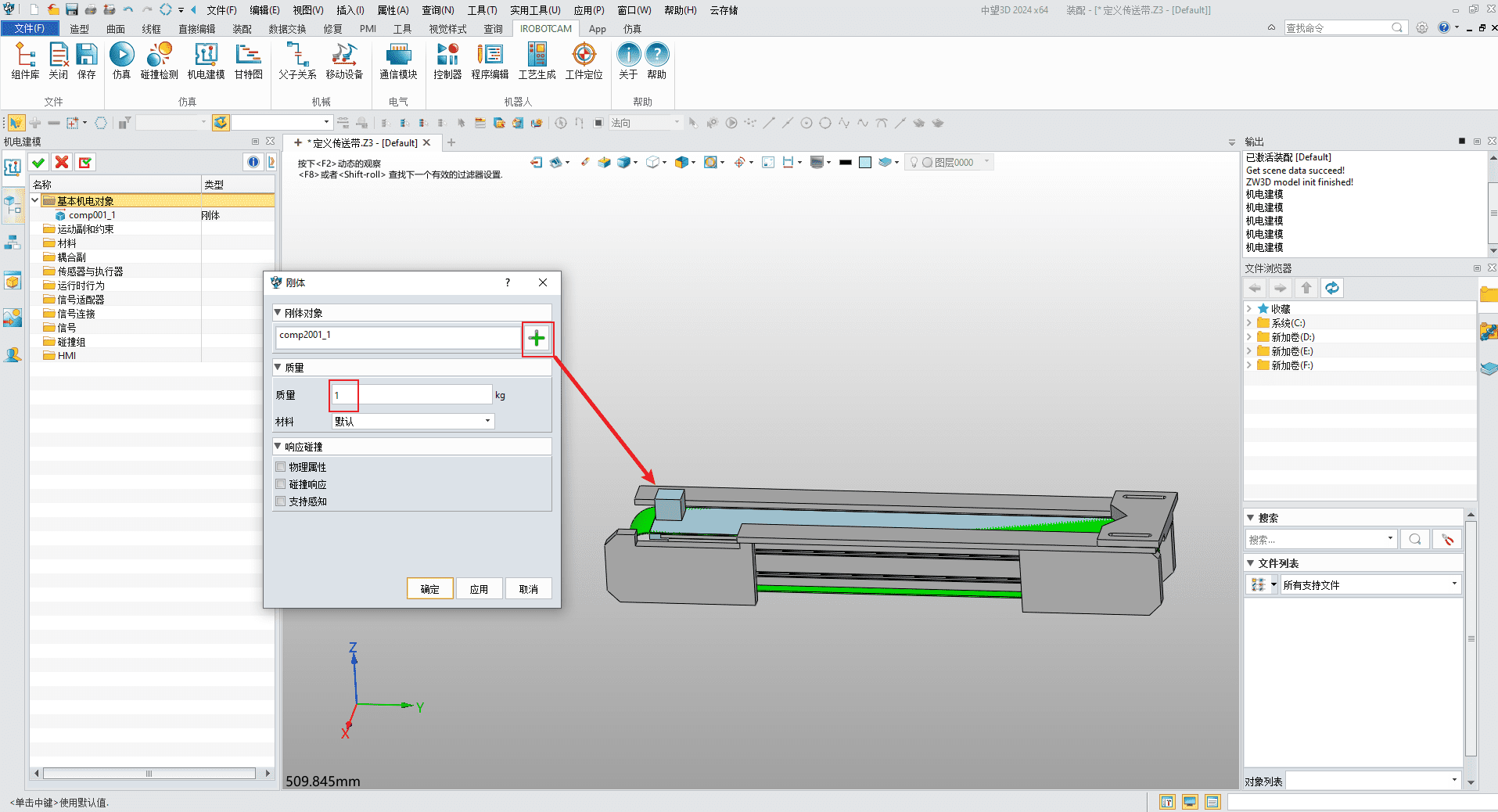
点击“+”按钮进入对象选择状态,点击鼠标左键选择右侧组件comp001即长木板,创建刚体,质量为“1”,材料“默认”,响应碰撞“不勾选”,点击确定按钮创建第一个组件为刚体。如下图所示:
- 物料comp2001:
通过“+”按钮,选择物料comp2001将其创建为刚体,质量为“1”,材料“默认”,响应碰撞“不勾选”。如下图所示:
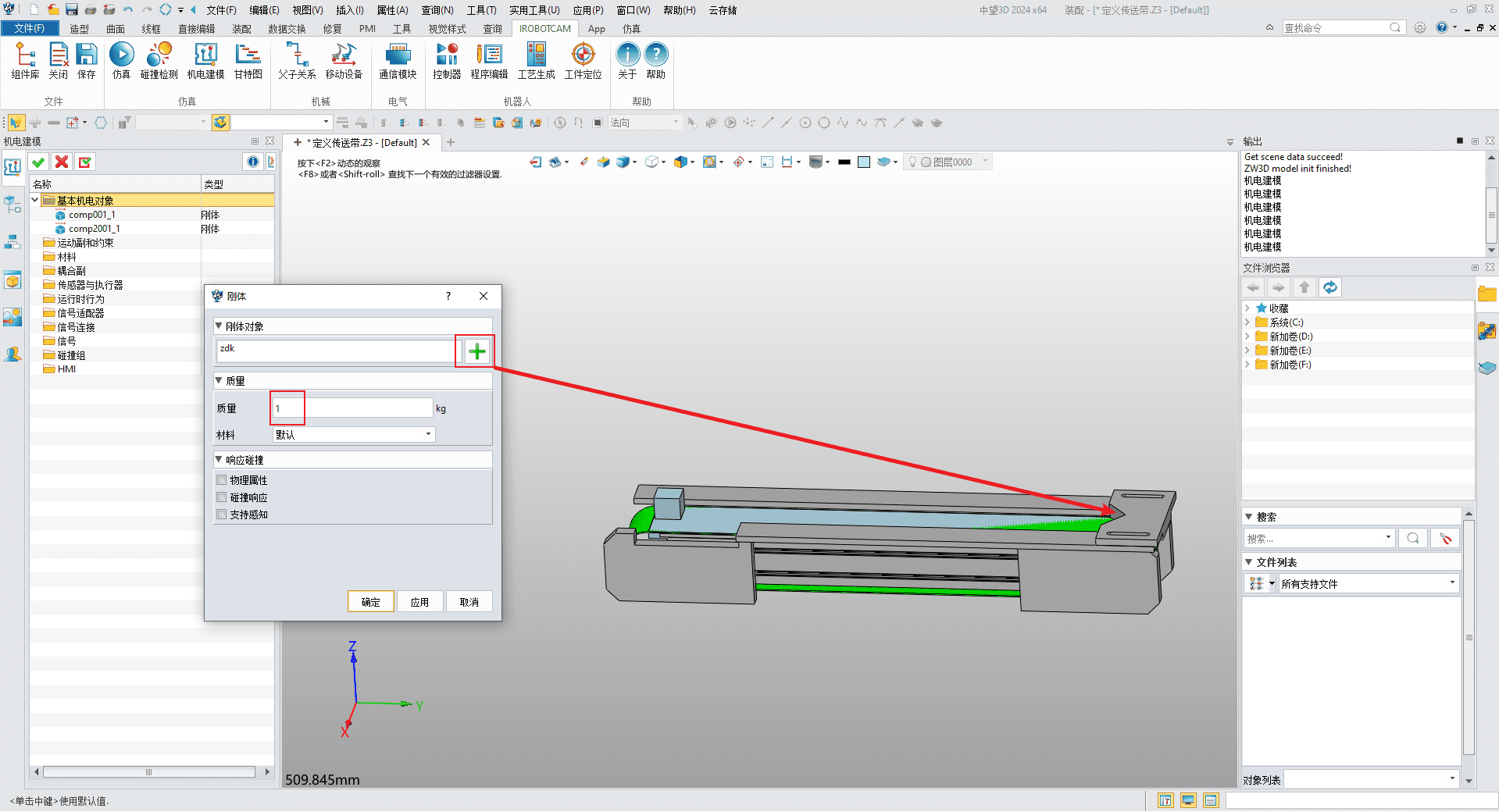
- 阻隔板zdk:
通过“+”按钮选择物料阻隔板zdk将其创建为刚体,质量为“1”,材料“默认”,响应碰撞“不勾选”。如下图所示:
在“机电建模”窗口下,点击“基本机电对象”,右键选择添加碰撞体。
- 长木板companies:
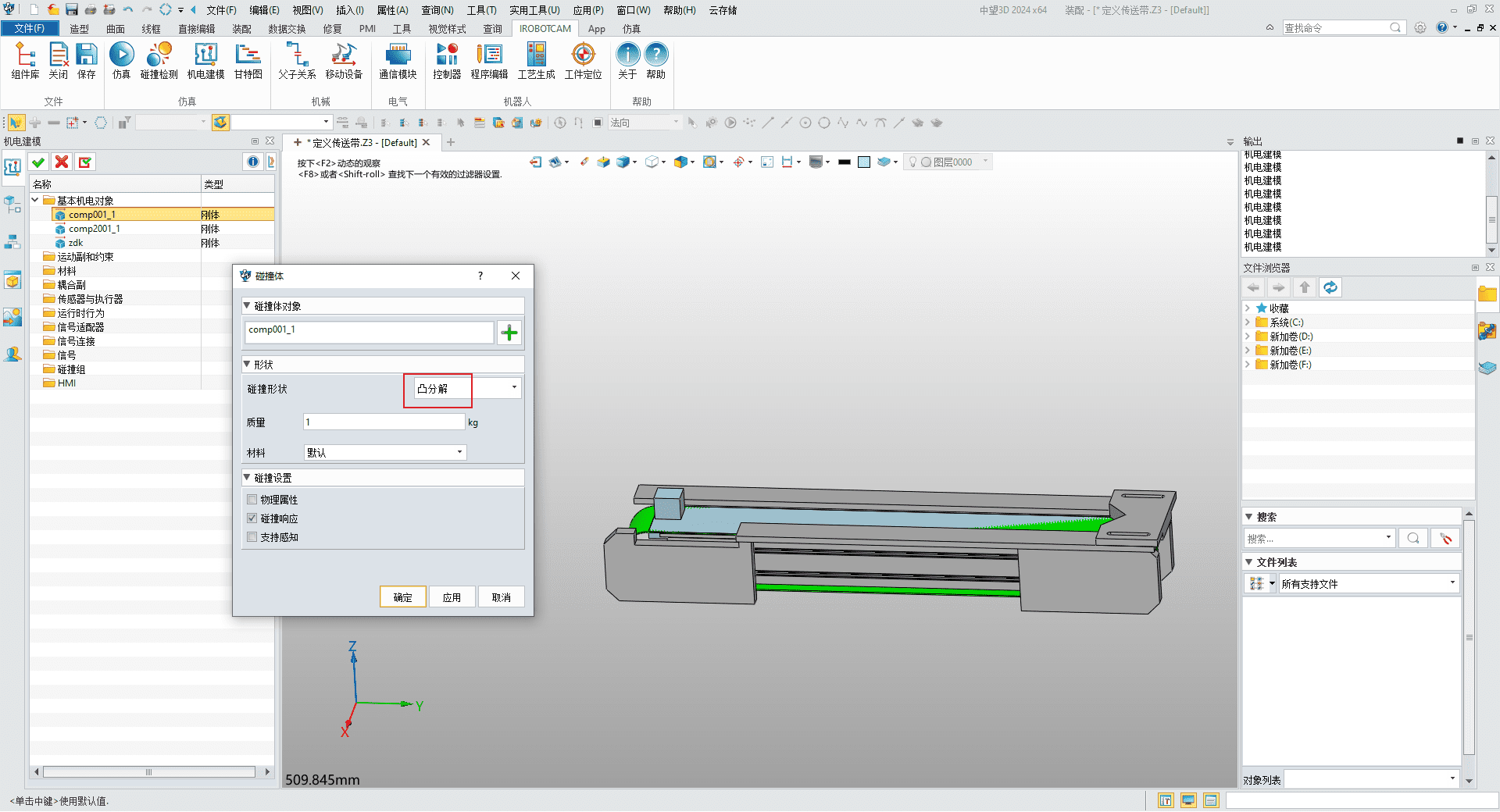
点击“+”按钮进入对象选择状态,选择左侧组件comp001即长木板创建碰撞体,碰撞形状选择“凸分解”,质量为“1”,碰撞设置选择“碰撞响应”,材料“默认”。如下图所示:
- 物料comp2001:
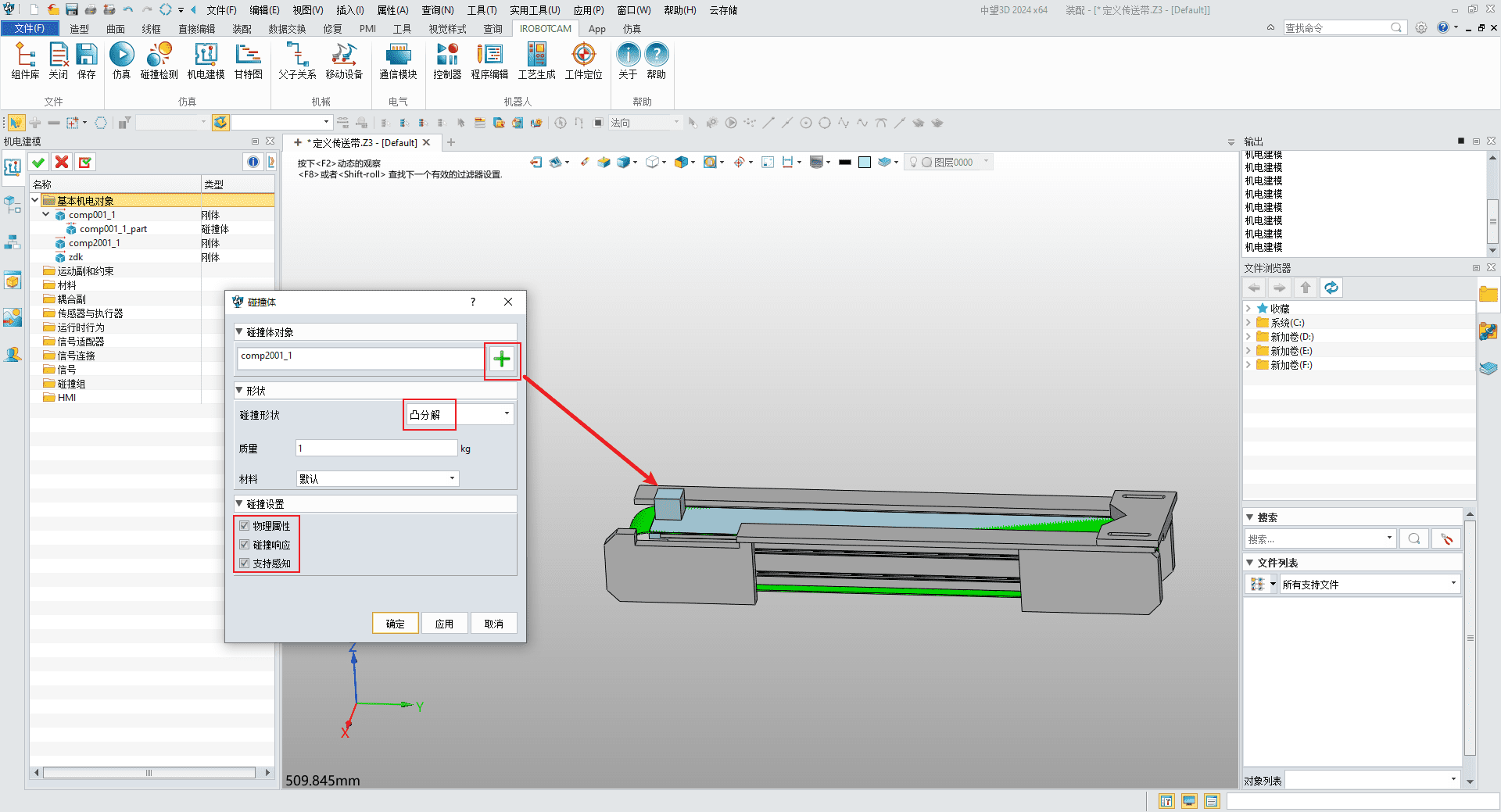
点击“+”按钮进入对象选择状态,选择右侧组件comp2001即物料创建碰撞体,碰撞形状选择“凸分解”,质量为“1”,碰撞设置选择“物理属性”、“碰撞响应”、“支持感应”,材料“默认”。如下图所示:
- 阻隔板zdk:
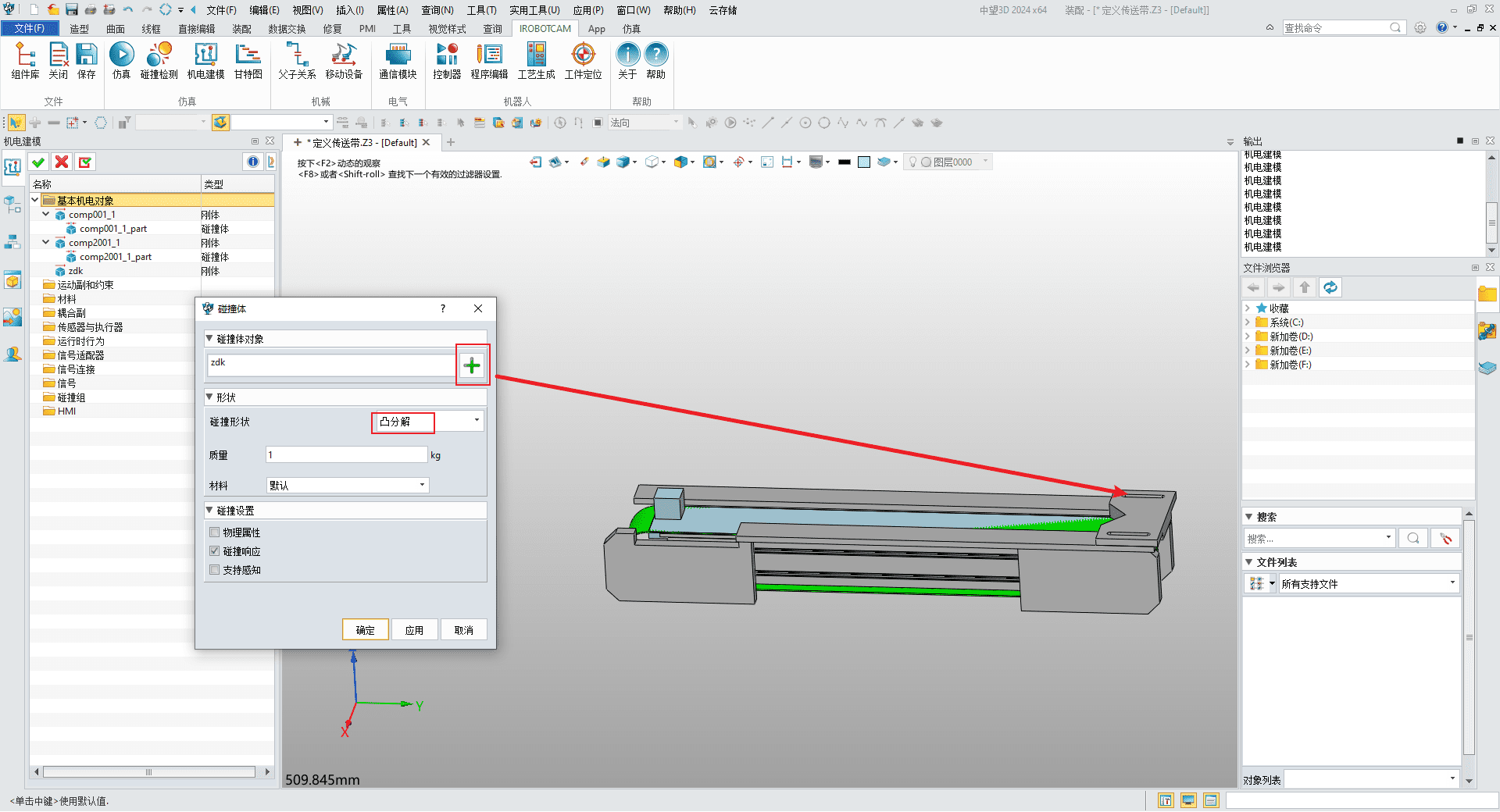
点击“+”按钮进入对象选择状态,选择右侧组件zdk即阻隔板创建碰撞体,碰撞形状选择“凸分解”,质量为“1”,碰撞设置选择“碰撞响应”,材料“默认”,点击确定。(此过程要耐心等待一下)如下图所示:
- 长木板companies:
-
步骤3:添加基本对象框架
到这里,我们创建了“基本机电对象”下所有刚体和碰撞体。如下图所示: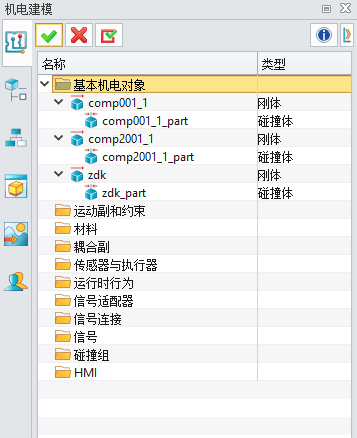
-
步骤4:添加传送面
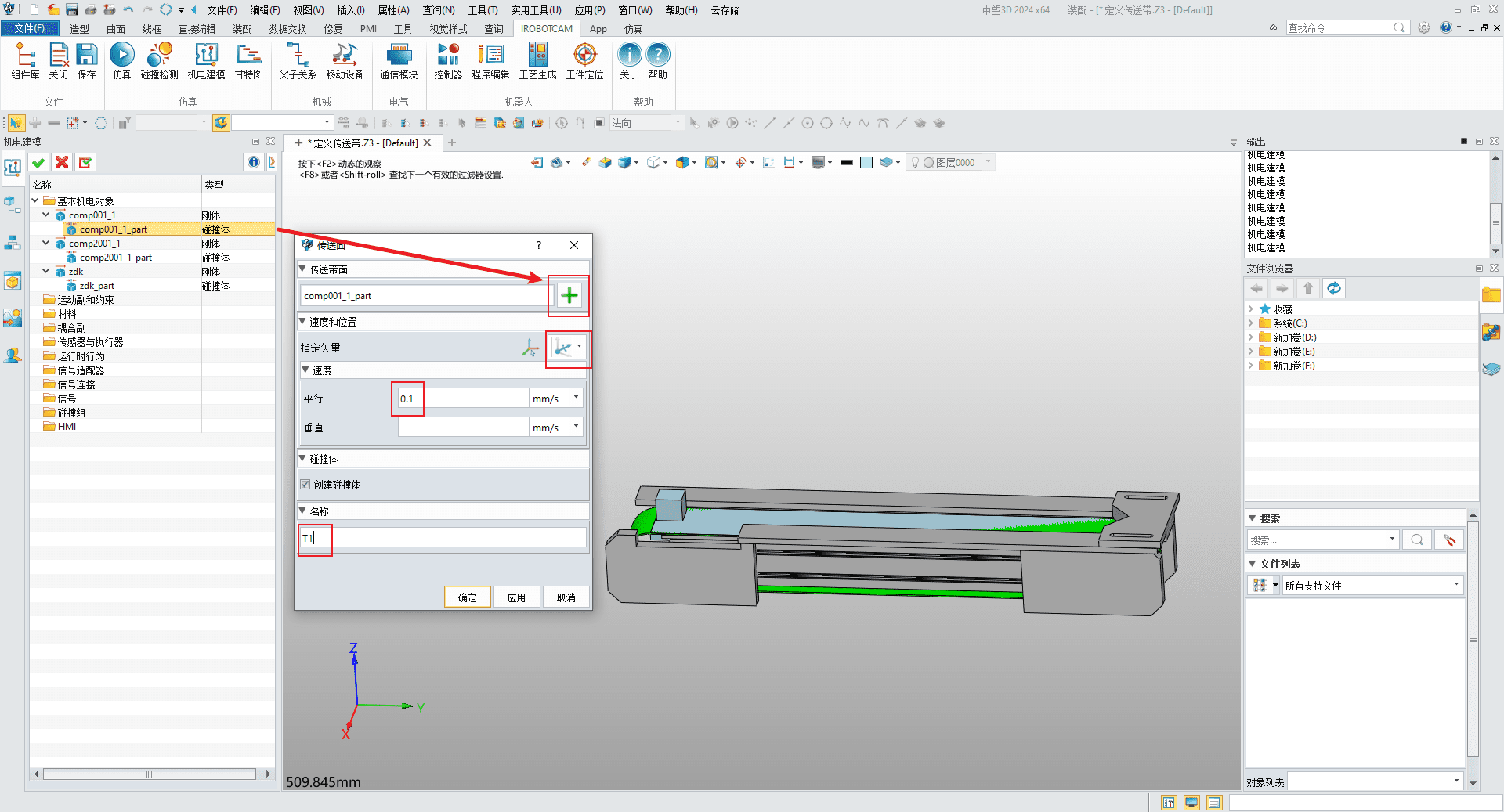
在“传感器与执行器”上右键选择“添加传送面”,打开“添加传送面”窗口。如下图所示:首先在“基本机电对象”下选择碰撞体comp001_1_part,然后点击传送面窗口中的“+”按钮;接着在“传送面”窗口“指定矢量”的坐标轴下拉列表选择“第二个条目”,即选定传送面沿Y轴方向运动。输入传送带速度为“0.1”,及名称命名为“T1”,其他空白框默认,最后点击确定生成传送面对象。如下图所示: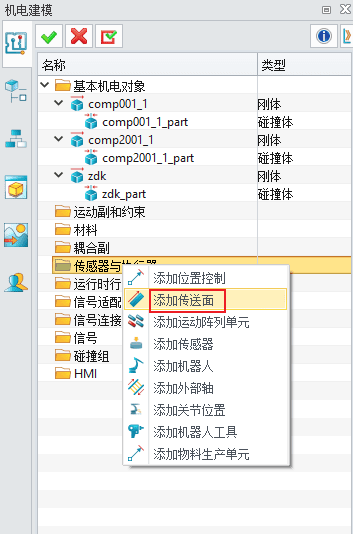
-
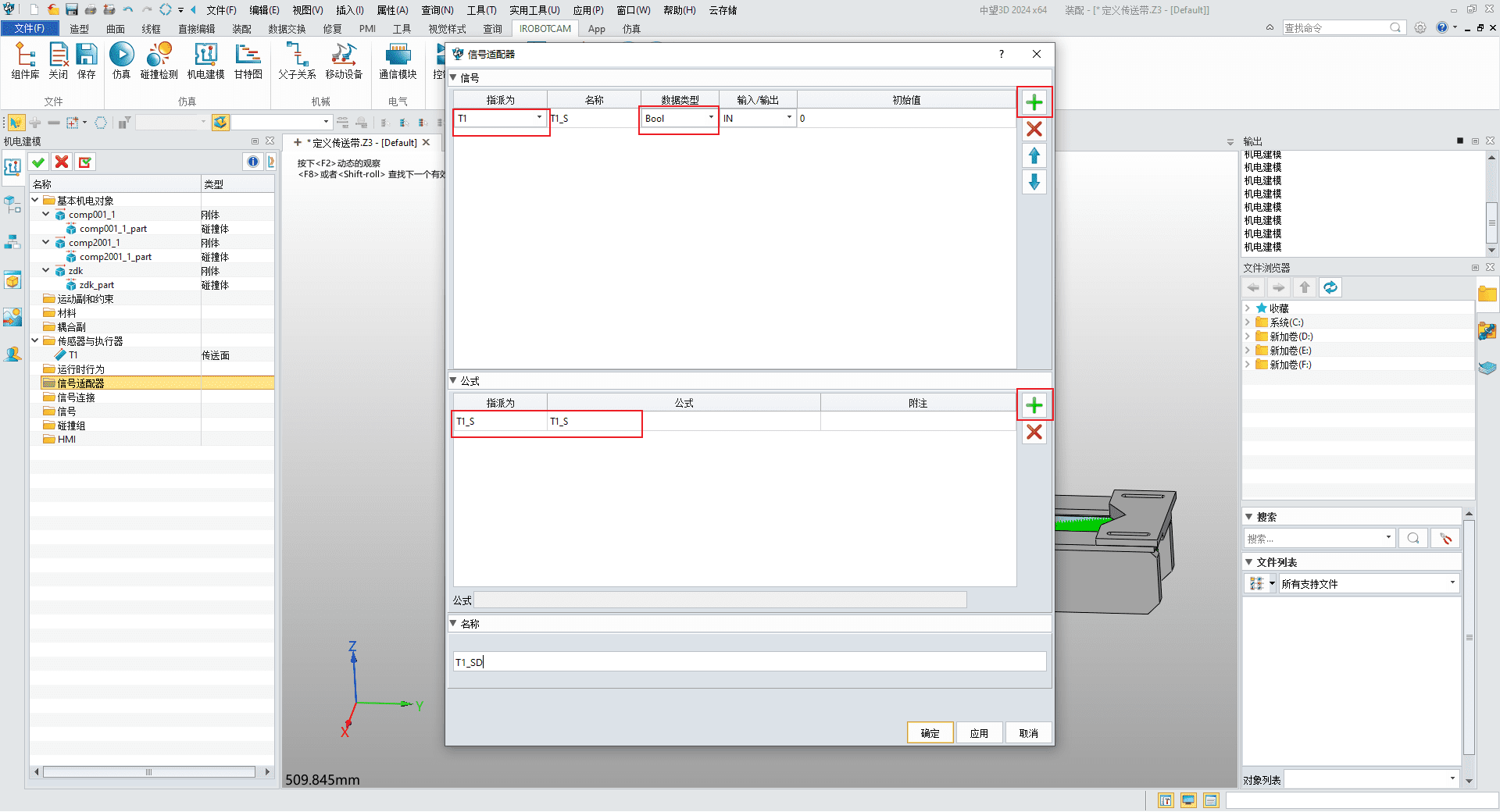
步骤5:添加信号适配器
点击“信号适配器”,右键选择添加信号适配器。如下图所示:点击“传感器与执行器”,点击“+”按钮,选择“传送面T1”,按照下图所示添加信号、公式及名称等参数,然后点击确定,生成信号适配器对象以及信号对象。如下图所示: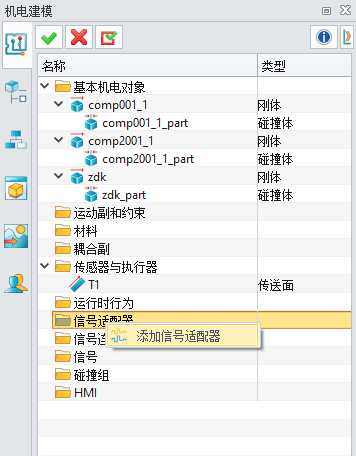
-
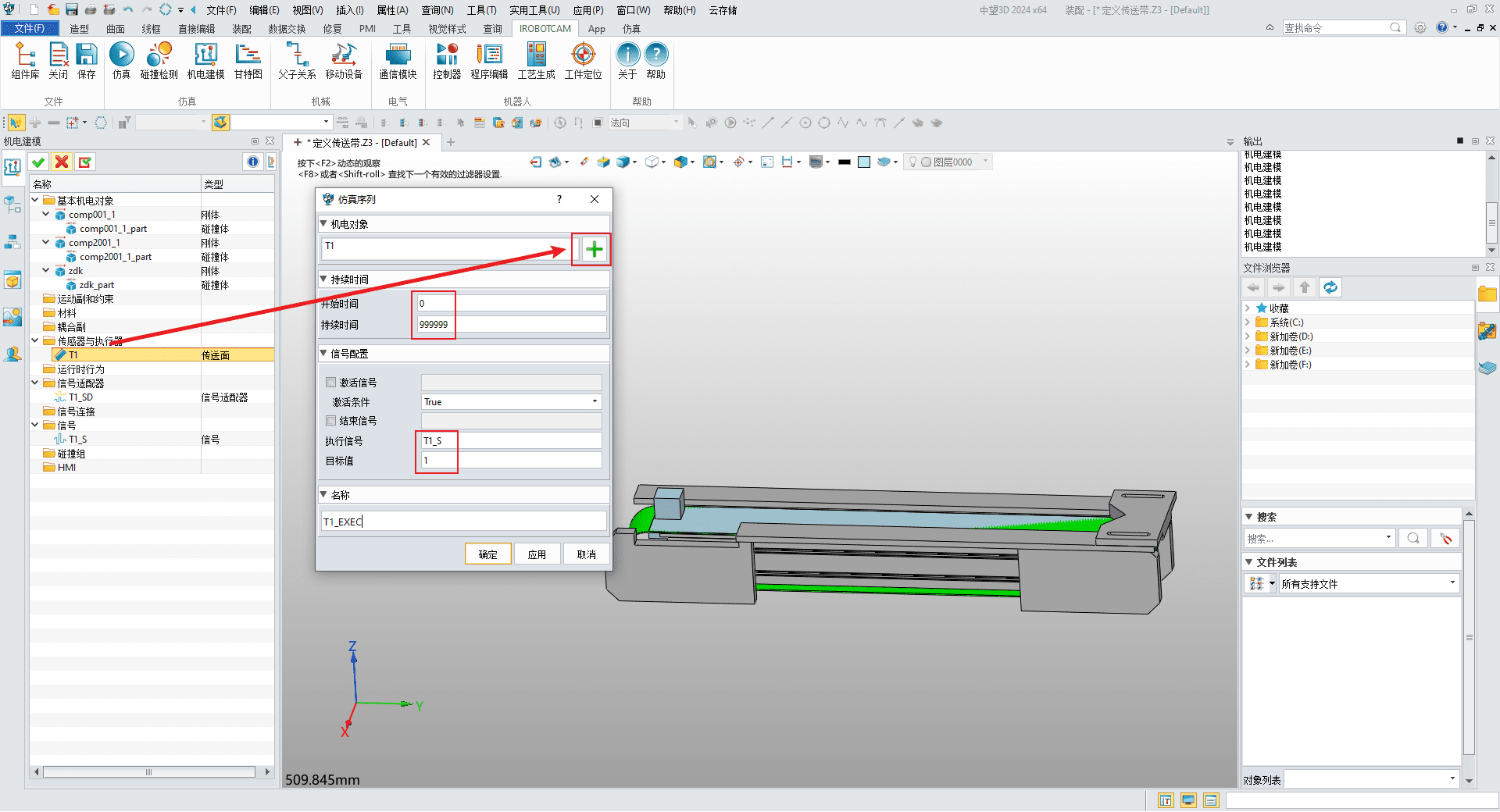
步骤6:添加运行时行为
点击“运行时行为”,右键选择“添加仿真序列”,打开“仿真序列”窗口。如下图所示:点击“传感器与执行器”,点击“+”按钮来选择传送面T1,输入开始时间为“0”,持续时间为“999999”、取消勾选“激活信号”、“结束信号”,执行信号为“T1_S”、目标值为“1”,名称为“T1_EXEC”,然后点击确定。如下图所示: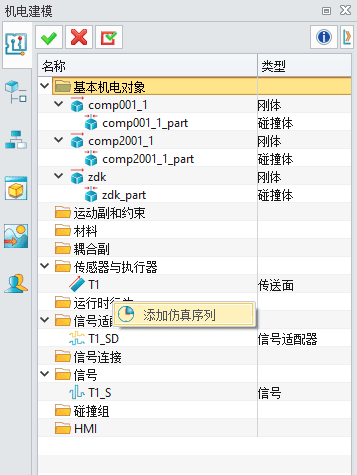
-
仿真验证
在“IROBOTCAM”选项卡栏下,点击仿真按钮。如下图所示:在模式下点击实时模式。如图2-20所示:
点击实时模式切换到实时仿真,当前实时仿真见右下方消息输出框。如下图所示。
点击“仿真控制”中的开始仿真按钮,即可看到物料被输送到传送带右侧。如下图所示:
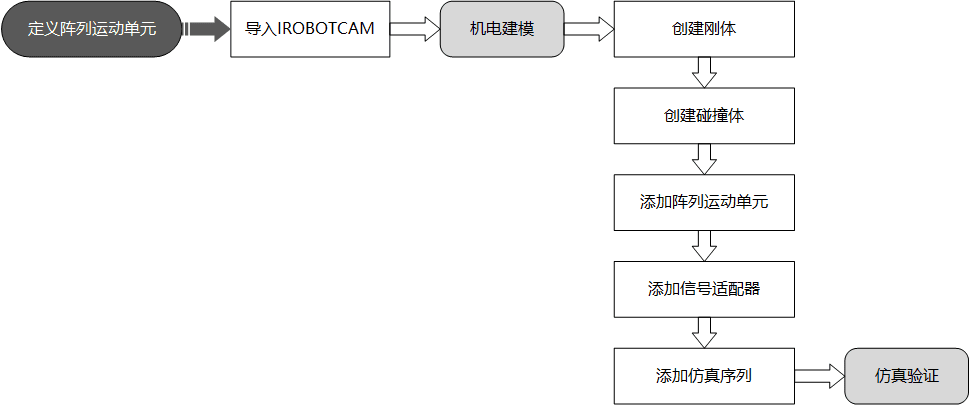
4.3 定义阵列单元
-
步骤1:打开文件
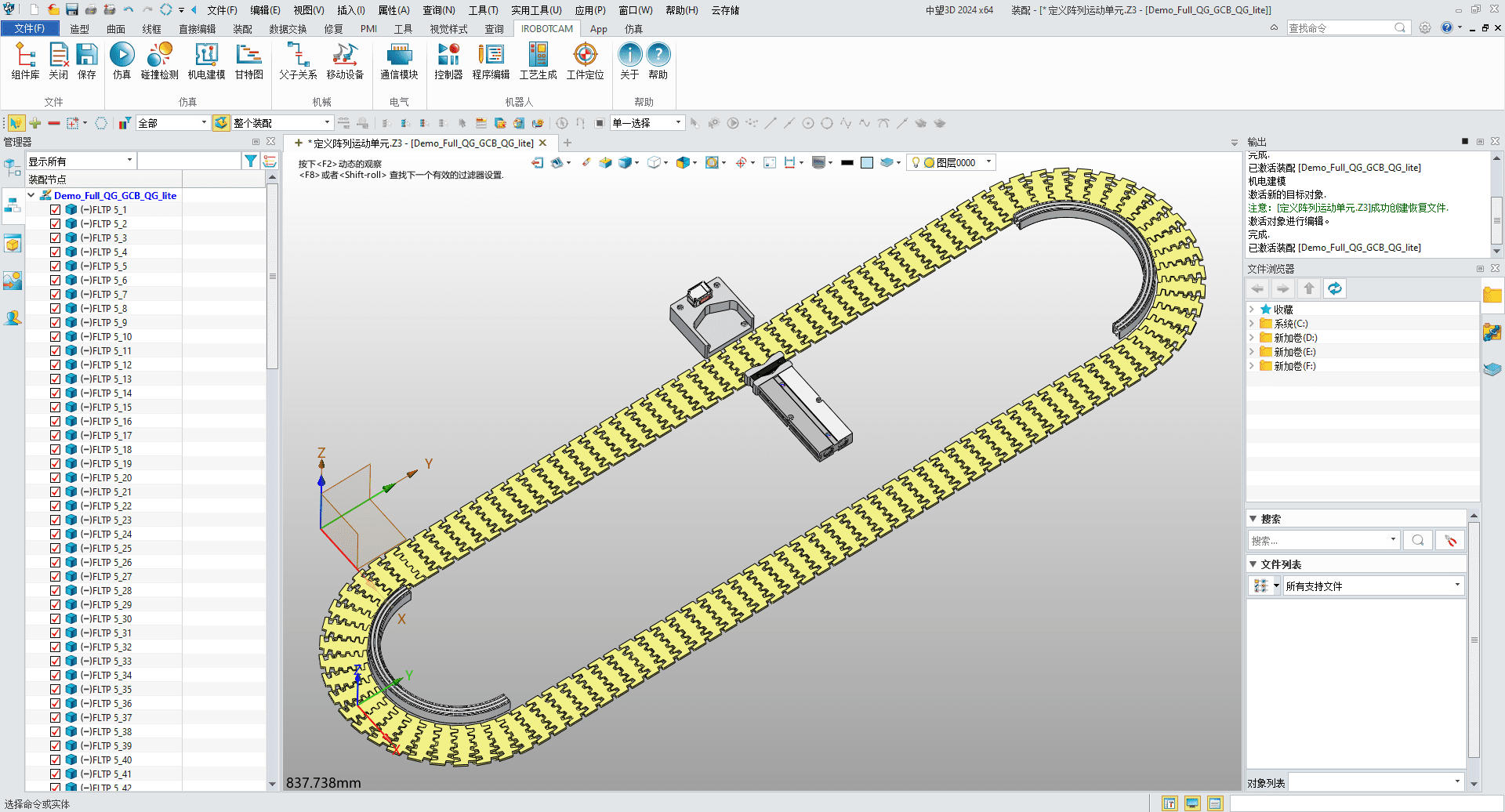
打开文件“定义阵列运动单元.Z3”进入IROBOTCAM环境。如下图所示:在“过滤器”上下拉按钮选择装配体,即可看到“Demo_Full_QG_GCB_QG_lite”装配体,然后双击打开装配。如下图所示:
打开后界面组件详情。如下图所示: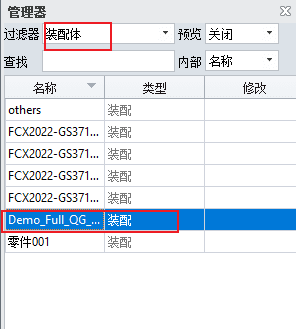
-
步骤2:创建刚体
在“IROBOTCAM”选项卡下,点击进入“机电建模”界面。如下图所示:在“机电建模”窗口下,点击“基本机电对象”,右键选择添加刚体,打开“添加刚体”窗口。如下图所示:
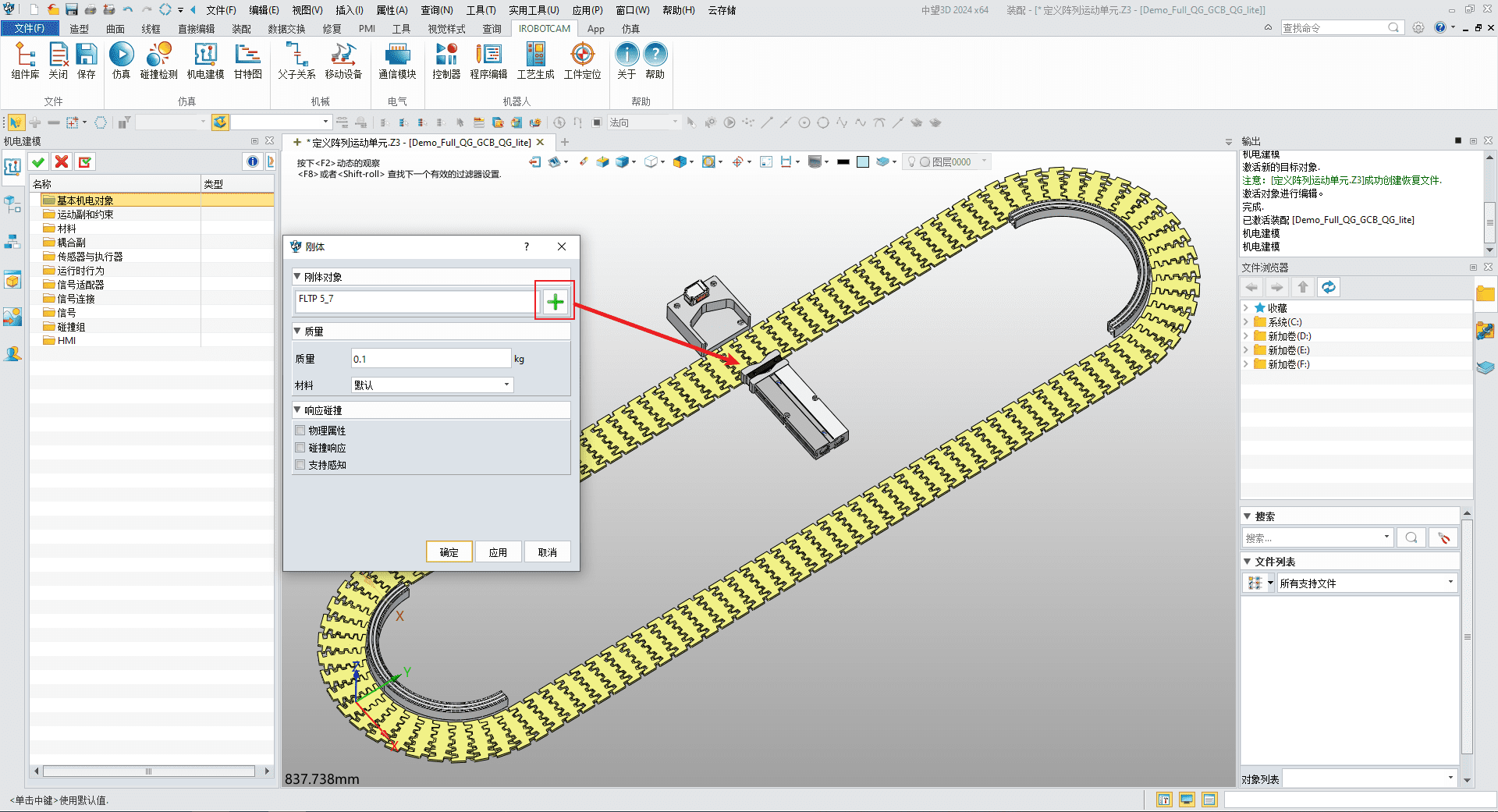
点击“+”按钮,选择组件FLTP5_7,输入质量为“0.1”,材料“默认”,响应碰撞“不勾选”,点击确定按钮创建刚体。如下图所示:
-
步骤3:创建碰撞体
阵列运动单元需要选定一个传送带组件(含刚体与碰撞体)作为基础模型来创建整个传送带,因而此处创建碰撞体选择的组件应与步骤2创建刚体选择的组件保持一致。
点击“基本机电对象”,右键选择“添加碰撞体”,打开“碰撞体”窗口,通过“+”按钮选择组件FLTP5_7,输入质量为“0.1”,材料“默认”,碰撞形状需要选择“凸分解”,碰撞设置“不勾选”,点击确定按钮等待创建碰撞体。(此处需要注意:根据模型的复杂度以及用户的计算机性能,凸分解算法等待时间有差异,此示例模型等待时间大约为10秒。)如下图所示: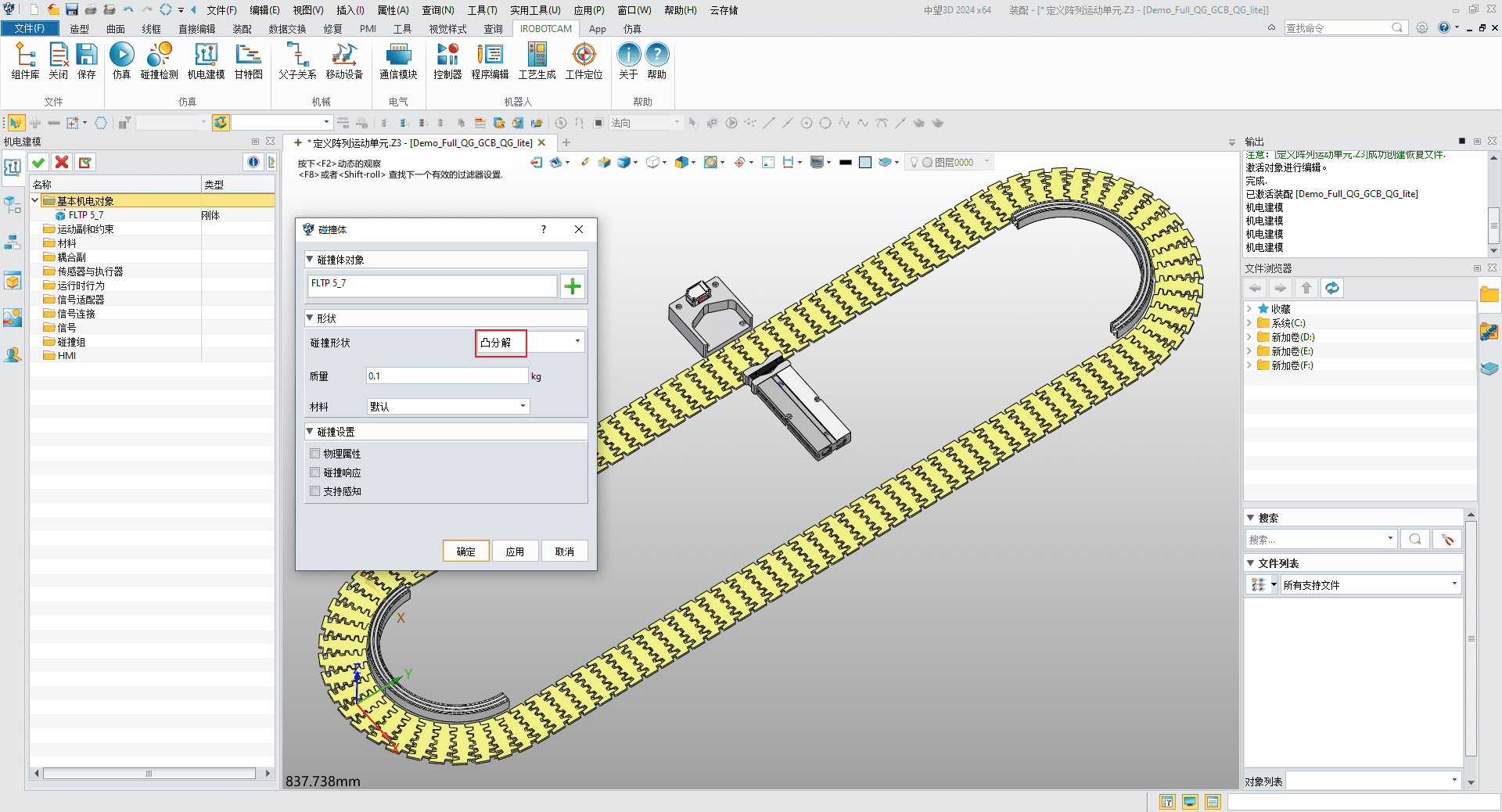
-
步骤4:添加阵列运动单元
点击“传感器与执行器”,右键选择“添加阵列运动单元”。如下图所示:点击“+”按钮选择刚体“FLTP5_7”,速度为“0.1”,名称命名为“T1”。如下图所示: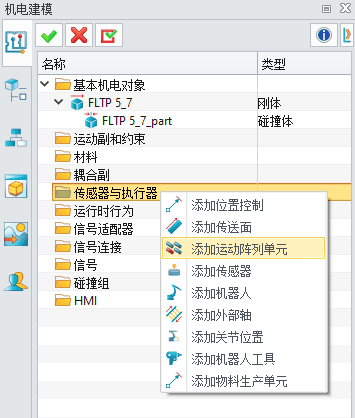 点击“+”按钮,然后接着按照图片介绍操作阵列元素选择所有传送带组件。(右侧3D视口即为高亮部分,然后按下鼠标中键。)如下图所示:
点击“+”按钮,然后接着按照图片介绍操作阵列元素选择所有传送带组件。(右侧3D视口即为高亮部分,然后按下鼠标中键。)如下图所示: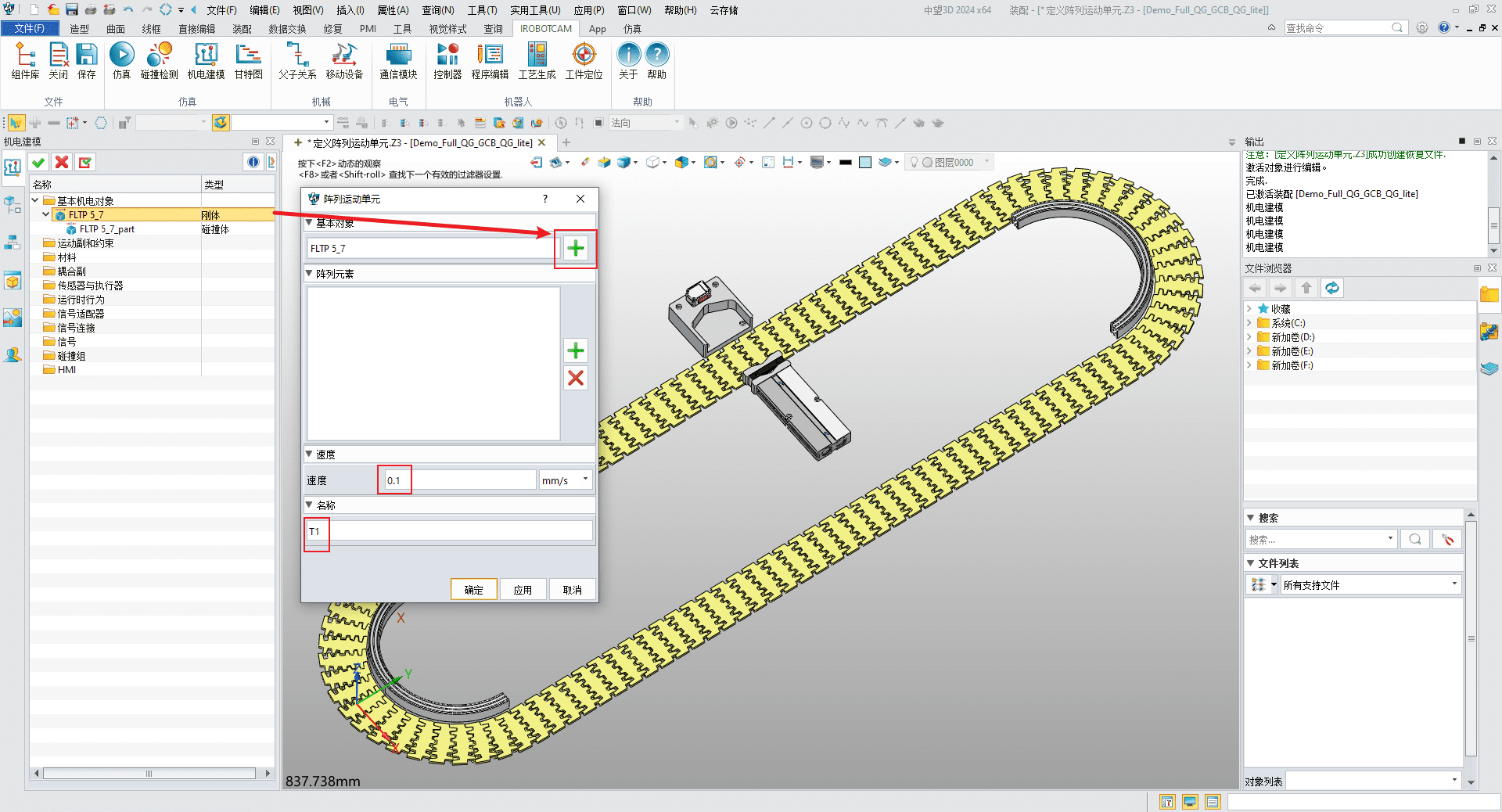 点击鼠标中键后阵列元素添加详情。如下图所示:
点击鼠标中键后阵列元素添加详情。如下图所示: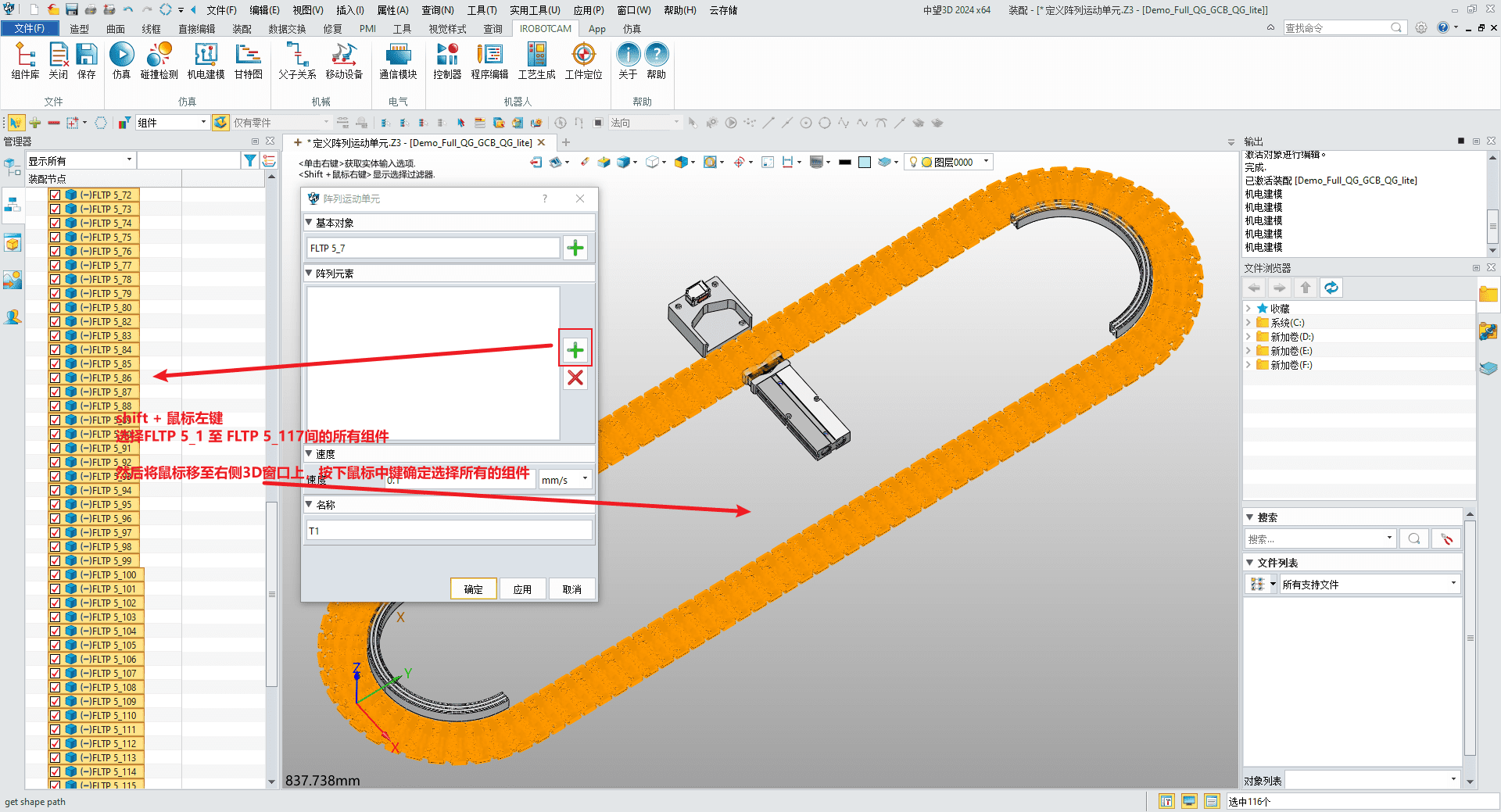 添加完成后,点击确定按钮,在“机电建模”窗口,基本机电对象下等待生成圆形传送带以及传送带上所有的刚体和碰撞体。如下图所示:
添加完成后,点击确定按钮,在“机电建模”窗口,基本机电对象下等待生成圆形传送带以及传送带上所有的刚体和碰撞体。如下图所示: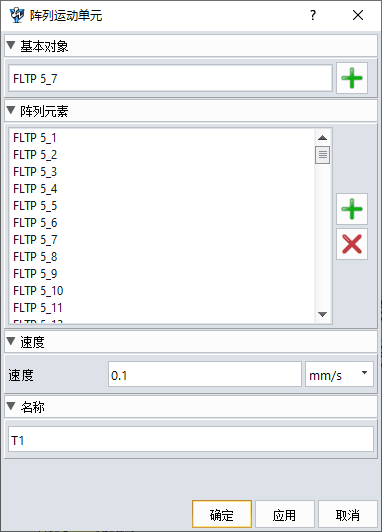

-
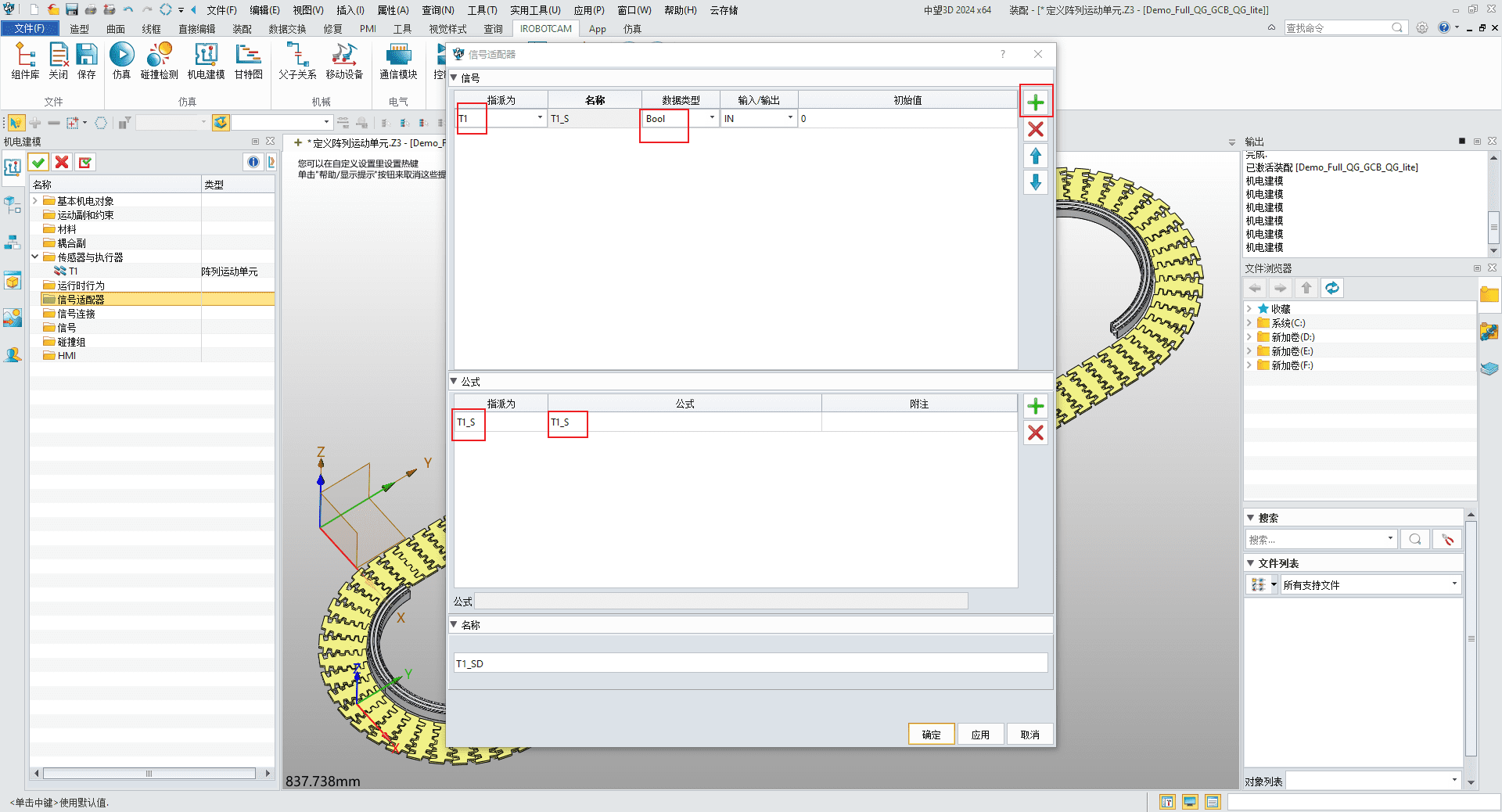
步骤5:添加信号适配器
点击“信号适配器”,右键选择“添加信号适配器”。如下图所示:点击“传感器与执行器”,点击“+”按钮,选择“传送面T1”,按照下图所示添加信号、公式及名称等参数,然后点击确定,生成信号适配器对象以及信号对象。如下图所示: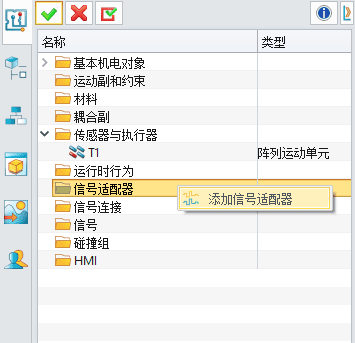
-
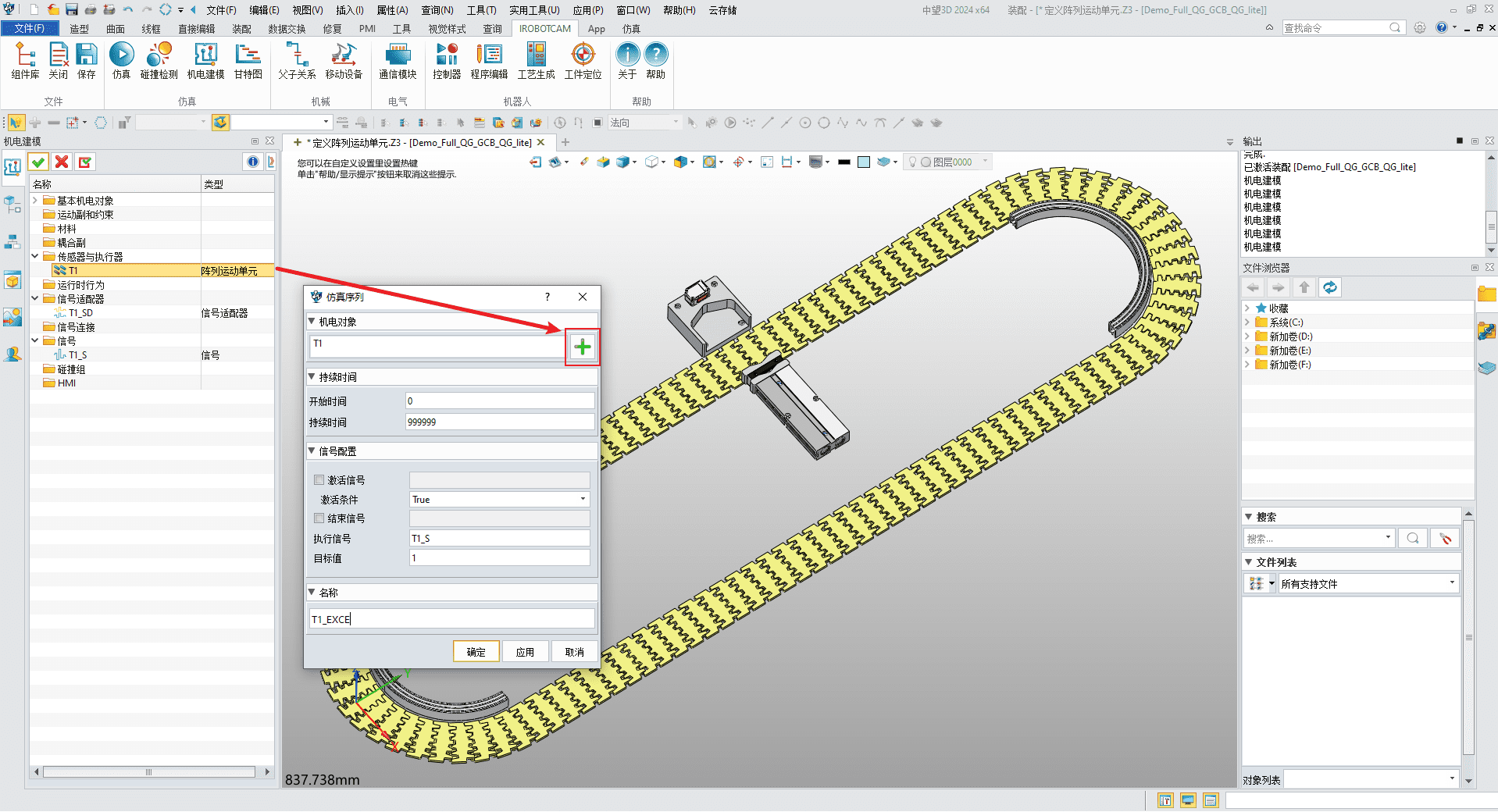
步骤6:添加运行时行为
点击“运行时行为”,右键选择“添加仿真序列”,打开“仿真序列”窗口。如下图所示:点击“传感器与执行器”,点击“+”按钮来选择传送面T1,输入开始时间为“0”、持续时间为“999999”、取消勾选“激活信号”、“结束信号”,执行信号为“T1_S”、目标值为“1”,名称为“T1_EXEC”,然后点击确定。如下图所示:
-
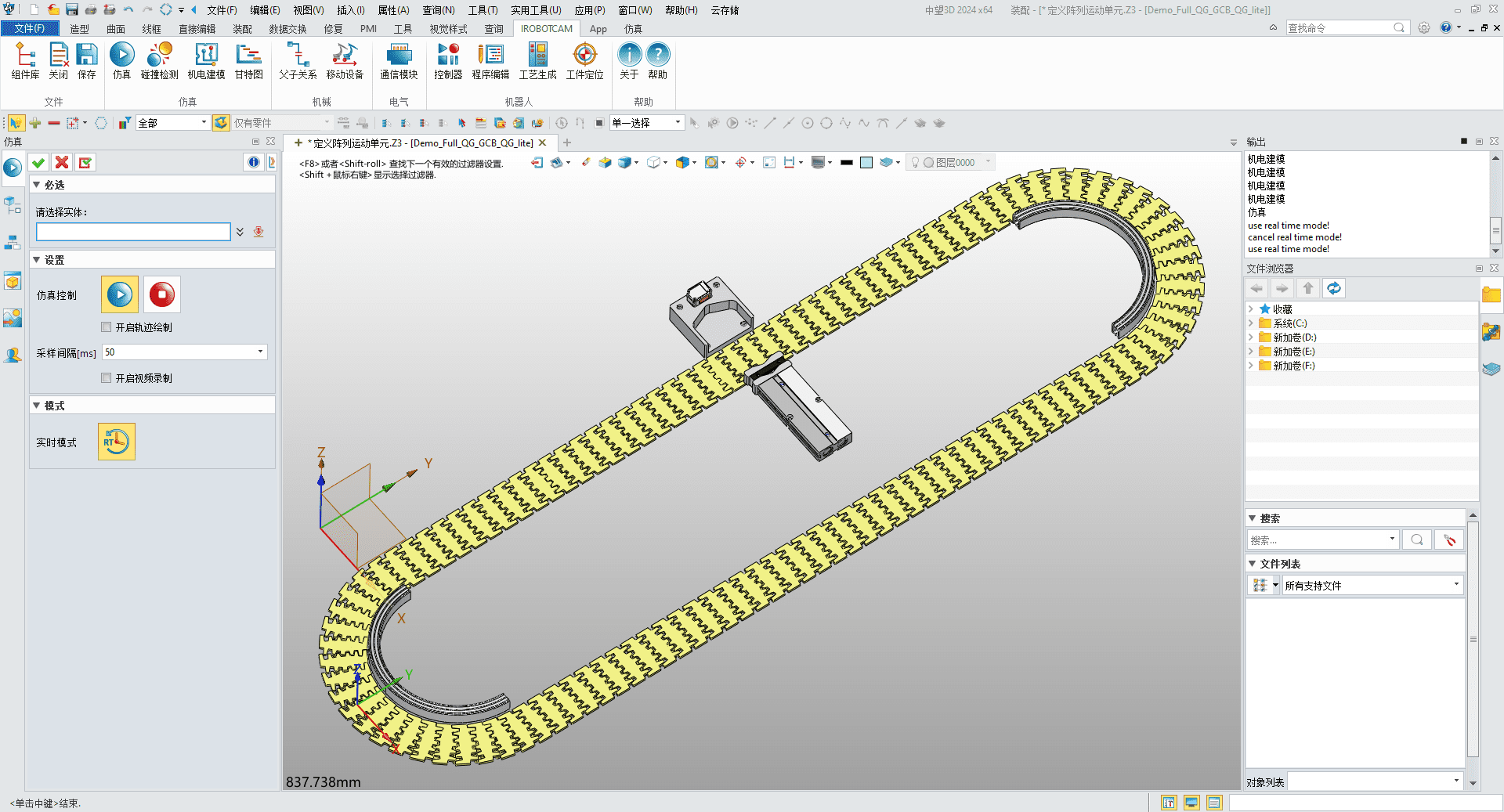
仿真验证
在“IROBOTCAM”选项卡栏下,点击仿真按钮。如下图所示:在模式下点击实时模式。如图2-20所示:
点击实时模式切换到实时仿真,当前实时仿真见右下方消息输出框。如下图所示。
点击“仿真控制”窗口中的开始仿真按钮,即可看到传送带开始运动。如下图所示:
4.4 创建机器人
-
步骤1: 打开文件
打开文件“创建机器人.Z3”。如下图所示:双击“RB20装配体-外发20150610”打开。如下图所示:
打开界面组件详情。如下图所示: -
步骤2:移动组件
选中第一个组件,按住shift键,选中最后一个组件,所有组件被选择,然后右键打开“移动”选项卡。如下图所示:选择“点到点移动”,点击起始点框,在建模界面窗口任意位置鼠标右键选择曲率中心,接着在机器人的底座上取曲率中心点位,在“目标点”中点击原点中心坐标位置。如下图所示:将方位下的“参考向量和目标向量”输入如下图所示参数值(也可借助面法向功能)。机器人的正确位置和原点位置。如下图所示: -
步骤3:合并组件
通过按住ctrl键,选中属于Link1的所有组件,然后右键选择“组成子装配体”。如下图所示:勾选仅零件,将零件名命名为“Link1”,点击确认。如下图所示:按照上述方法将“Link3、Link4、Link5”的下所有组件进行组成子装配体。如下图所示:双击“子装配体Link1”,然后在“装配”一栏下,选择“合并”选项。如下图所示:进入合并界面,将鼠标在界面上画出能将高亮部分全部圈起来的方框,然后左侧会显示需要合并的组件个数即组成子装配体的个数,最后点击左侧勾号进行合并。如下图所示:按照上述操作将其余组件“Link3、Link4、Link5”,进行双击合并组件,所有组件合并完成后双击“RB20装配体-外发20150610”进行激活装配体。如下图所示: -
步骤4:重命名组件
将其余三个组件进行重命名,单击“RB20大臂”组件,然后鼠标右键选择重命名组件。如下图所示:在重命名文件框下,双击“新对象名”下的空白框,输入“Link2”组件名,点击应用按键,可快速的将“RB20腕体联结法兰”命名为“Link6”、“RB20底座”命名为“Base”。如下图所示:最后组件重命名详情界面。如下图所示: -
步骤5:校验机器人位姿
在“查询”选项卡中选择“距离”可以测量模型尺寸,选择角度可以测量模型位姿。如下图所示:校验位姿的好处是可以保证在后续建立机器人关节甚至用关节构建机器人时,能够准确无误。 -
步骤5:准备坐标位置
在“造型”选项卡中选择“基准CSYS”选项。如下图所示:在“基准CSYS”栏下选择“动态坐标系”。如下图所示:然后将“组件Link1”进行隐藏即取消勾选Link1。如下图所示:创建机器人坐标系(Link1到Link6关节旋转轴坐标系、基座标和法兰坐标)
- Link1关节旋转轴CSYS1:鼠标在建模界面任意位置右键选择“曲率中心”,将其放在如图4-21所示机器人关节Link1旋转轴位置上,然后调整XYZ坐标系的方向(只要保证Z轴方向正确即可),当前机器人底座坐标为中心三重轴坐标系。点击勾号创建完成。如下图所示:
按照上述操作将其余坐标系构建完成,坐标系放置位置位于机器人每个组件关节的旋转轴处,除“基座标”和“法兰坐标”外其余坐标只要求Z轴方向对即可。 其中基坐标和原点坐标同一点,但创建机器人时不可以使用中心三重轴坐标系,可将中心三重轴坐标系(默认坐标系)进行隐藏即。-
CSYS8:基座标“CSYS8”的创建方法,在上述操作的基础上将鼠标在界面任意位置右键选择“关键点”,将鼠标放在中心三重轴坐标系中心点,点击回车键,位置为“0,0,0”即基座标创建成功。
-
CSYS6:其中“CSYS6(关节坐标系)”可以创建在“组件Link6”的最内侧旋转轴处,也可以在最外侧旋转轴处。
-
CSYS7:“CSYS7(法兰坐标)”在“组件Link6”的最外侧关节旋转轴处,其XYZ轴方向有要求。
当“CSYS6(关节坐标系)在最外侧旋转轴时”和“CSYS7(法兰坐标)”重合,所以此处创建一个坐标系即可,但方向必须遵循法兰坐标。原因:“CSYS6”只要求Z轴方向,创建机器人是要选择法兰坐标,所以创建一个点时要遵循法兰坐标轴。图中为了让用户更好理解两种坐标系区别在最外侧关节旋转轴建立两个。如下图所示:
-
步骤6:创建刚体和碰撞体
在“IROBOTCAM选项卡”中,点击“机电建模”选项。如下图所示:在“机电建模”窗口下,点击“基本机电对象”,右键选择“添加刚体”,打开“添加刚体”窗口。如下图所示:
依次选择七个关节组件对象“创建刚体”,质量都为“1”,响应碰撞“不勾选”,材料“默认”。如图4-25所示:
七个关节组件对象添加完刚体后,界面详情。如下图所示:然后依次选择七个组件对象“创建碰撞体”,碰撞形状选择“凸包”,质量都为“1”,碰撞设置“不勾选”,材料“默认”。如下图所示:将七个组件对象添加完碰撞体后,界面详情。如下图所示: -
步骤7:创建关节
在“IROBOTCAM选项卡”栏,点击“机电建模”,点击“运动副和约束”,右键选择“添加铰链副”,打开“添加铰链副”窗口。如下图所示:- Robot_J1: 点击“+”按钮在场景中选择子节点“刚体Link1_1”和父节点“碰撞体Base_part”;点击指定轴矢量从场景中选择“基准CSYS1”;输入关节的上限“170”和下限“-170”;起始角为“0”,运动类型选择“反解模式”;输入关节的名称为“Robot_J1”;点击确定按钮。如图下图所示:
依次创建机器人的六个关节,参数分别为:
- Robot_J2:子节点“刚体Link2”和父节点“碰撞体Link1_1_part”,指定轴矢量选择“基准CSYS2”,输入关节的上限“132”和下限“-95”,起始角为“0”,运动类型选择“反解模式”;输入关节的名称为“Robot_J2”。
- Robot_J3:子节点“刚体Link3_1”和父节点“碰撞体Link2_part”,指定轴矢量选择“基准CSYS3”,输入关节的上限“73”和下限“-165”,起始角为“0”,运动类型选择“反解模式”;输入关节的名称为“Robot_J3”。
- Robot_J4:子节点“刚体Link4_1”和父节点“碰撞体Link3_1_part”,指定轴矢量选择“基准CSYS4”,输入关节的上限“180”和下限“-180”,起始角为“0”,运动类型选择“反解模式”;输入关节的名称为“Robot_J4”。
- Robot_J5:子节点“刚体Link5_1”和父节点“碰撞体Link4_1_part”,指定轴矢量选择“基准CSYS5”,输入关节的上限“133”和下限“-133”,起始角为“0”,运动类型选择“反解模式”;输入关节的名称为“Robot_J5”。
- Robot_J6:子节点“刚体Link6”和父节点“碰撞体Link5_1_part”,指定轴矢量选择“基准CSYS6”,输入关节的上限“360”和下限“-360”,起始角为“0”,运动类型选择“反解模式”;输入关节的名称为“Robot_J6”。
六个关节铰链副界面详情。如下图所示:
-
创建机器人
在“机电建模”窗口下,点击“传感器与执行器”,右键选择“添加机器人”,打开“添加机器人”窗口。如下图所示:
机器人测量方法:
在“查询”栏点击距离选项。如下图所示:
- 步骤9:示教机器人
点击创建完成的机器人,鼠标右键选择“示教机器人”选项。如图下图所示:
4.5 示教编程-画圆弧
-
步骤1:打开文件
打开文件“画圆弧.Z3”进入IROBOTCAM环境,双击“画圆弧”打开。如下图所示:双击“画圆弧”装配体,进行激活。如下图所示:
点击界面上部“着色模式显示边”后界面详情。如下图所示: -
步骤2:查看拖动示教
在“IROBOTCAM选项卡”中,点击“机电建模”选项。如下图所示:点击机器人右键选择“示教机器人”选项。如下图所示:
-
步骤3:添加标记点
点击“机器人示教”窗口中的“指定点”,选择CSYS1基准坐标系,在弹框中选择第一个点,机器人会移动至该位置,然后点击标记点。如下图所示:然后接着点击“指定点”,将“CSYS2” 、“CSYS3”两点,点击“+”按钮添加标记。如下图所示:在“机器人示教”窗口中点击loc-1,然后点击“箭头”转到标记点,使机器人再次移动到点1位置,再次点击“+”按钮标记,添加标记点4,最终得到4个标记点,在后续的程序编辑中,同一点位不能既出现MOVJ指令,又出现MOVL指令,故对同一位置添加不同标记以避免程序指令冲突。如下图所示:添加完标记点,点击回零按钮,使机器人到最初的位置。如下图所示: -
步骤4:程序编辑
在“IROBOTCAM选项卡”,点击“程序编辑”按钮。如下图所示:在“程序编辑”窗口,点击“program1”右键,选择“编辑程序”,打开程序参数界面。如下图所示:在“程序参数”窗口,选择运动指令中的“MOVJ指令”,添加MOVJ指令,参数设置如图所示,目标点为“loc-1”,其他参数保持默认,点击确定。如下图所示:然后添加MOVA指令,参数设置如图所示,目标点为“loc-3”,中间点为“loc-2”,其他参数保持默认,点击确定。如下图所示:然后添加MOVL指令,参数设置如图所示,目标点为“loc-4”,其他参数保持默认。如下图所示: -
步骤5:仿真验证
点击“程序编辑”窗口下,运行按钮。如下图所示:机器人开始运动。如下图所示:
4.6 机器人的抓与放
-
步骤1:打开文件
打开文件“机器人抓与放.Z3”,进入IROBOTCAM环境。如图所示:等待打开后界面详情,是在创建完成机器人GSK的环境下操作完成机器人抓放。此处创建机器人工具的刚体和碰撞体已创建完成。如下图所示:
-
步骤2:添加滑动副
在“运动副和约束”栏右键添加滑动副,点击“+”按钮,父节点默认不选,进行添加子节点为“1111Tool_ZSZ_1_1和1111Tool_ZSZ_Body_1_1”。点击指定轴矢量,然后点击此刚体上所建的“基准CSYS16”进行添加,勾选上限和下限,上限数字都为“0.002”,下限数字都为“0”。运动类型都选择“动力学”,名称命名为“W1”。然后接着对其余两对上下的刚体进行上述操作。如下图所示:W2:子节点为“1111Tool_ZSZ_3_1_2和1111Tool_ZSZ_Body_3_1”。指定轴矢量为“基准CSYS18”。 W3:子节点为“1111Tool_ZSZ_3_1_3和1111Tool_ZSZ_Body_2_1”。指定轴矢量为“基准CSYS13”。 对箭头所示三个位置添加完滑动副,点击创建的三个滑动副查看抓钩高亮显示是否正确。如下图所示: -
步骤3:添加碰撞传感器
点击“传感器与执行器”,右键添加碰撞传感器,将长度、宽度、高度依次设立为“0.025”,点击指定坐标系,然后点击箭头所指“坐标系CSYS8”,名称命名为“test11”,其余选项默认,最后点击确认。如下图所示: -
步骤4:添加信号
点击“信号”,右键添加信号,将IO类型选择“输出”,信号名称命名为“qidong”,端口为“-1”。然后点击确认。如下图所示: -
步骤5:添加机器人工具
点击“传感器与执行器”,右键添加机器人工具,点击“+”按钮,将“三个滑动副”作为选择对象,将目标、速度数字填写为“0.008”,最大加速度为“0.004”,最大加加速度为“0.006”。选择如图箭头所示两个刚体,感知点为“test11”传感器,基座标为“CSYS9坐标系”,工具中心选箭头所示“CSYS8坐标系”,最后加号选择对象“qidong信号”,将名称命名为“gongju”,点击确认。如下图所示: -
步骤6:建立父子关系
在“IROBOTCAM”选项栏点击父子关系,然后点击添加关系,将子设备选择“gongju”,安装到机器人“GSK”中,点击确认。如下图所示: -
步骤7:添加信号适配器(2个)
点击“信号适配器”,右键选择添加信号适配器。如图所示:点击“+”按钮选择机器人“GSKRobot”,将名称命名为“GSKRobot_S”,数据类型选择“Bool”。在公试一栏都填为“GSKRobot_S”,将名称命名为“GSKRobot_SD”。如下图所示:下拉按钮,选择机器人工具“gongju”,将名称命名为“gongju_S”,数据类型选择“Float”。在公试一栏都填为“gongju_S”,。将名称命名为“gongju_SD”。如下图所示: -
步骤8:添加信号
在“信号”上右键添加信号。如下图所示:将IO类型选择“输入”,信号名称写为“gongju_opt”,端口填写“0”。如下图所示: -
步骤9:添加仿真序列(3个)
点击“运行时行为上”,右键选择添加仿真序列。如下图所示:点击“+”按钮选择机器人“GSKRobot”,开始时间为“0.002”,持续时间为“999999”,取消勾选激活和结束信号,执行信号为“GSKRobot_S”,目标值为“1”,名称命名为“GSKRobot_EXEC”。如下图所示:点击“+”按钮选择机器人工具“gongju”,开始时间为“0”,持续时间为“5”,勾选“激活信号”,名称为“gongju_opt”,激活条件为“True”,执行信号为“gongju_S”,目标值为“0.008”,名称命名为“gongju_catch_EXEC”。如下图所示:点击“+”按钮选择机器人工具“gongju”,开始时间为“0”,持续时间为“5”,勾选“激活信号”,名称为“gongju_opt”,激活条件为“False”,执行信号为“gongju_S”,目标值为“0”,名称命名为“gongju_pull_EXEC”。如图所示: -
步骤10:添加刚体碰撞体
- 物料“WorkPiece_New_1”添加刚体:
点击“基本机电对象”,右键添加刚体,选择如图箭头所示刚体,质量为“1”,材料“默认”,不勾选“响应碰撞”,点击确认。如下图所示:
- 物料“WorkPiece_New_1”添加碰撞体:
在“基本机电对象”上右键添加碰撞体,选择如图箭头所示刚体,碰撞形状为“凸包”,“碰撞设置”为三个都选,材料“默认”。点击确认。如图所示:
- 物料台“Workpiece_Support1”添加刚体:
点击“基本机电对象”,右键添加刚体,选择如图箭头所示刚体,质量为“1”,不勾选“响应碰撞”,点击确认。如图所示:
- 物料台“Workpiece_Support1”添加碰撞体:
在“基本机电对象”上右键添加碰撞体,选择如图箭头所示刚体,碰撞形状为“凸包”,碰撞设置为“碰撞响应”,材料“默认”。点击确认。如图所示:
- 物料“WorkPiece_New_1”添加刚体:
-
步骤11:准备坐标位置
在“造型”栏中,点击基准CSYS,在物料上建立坐标系,注意Z轴方向要朝下,选择“动态坐标系”,在空白位置右键选择“曲率中心”。如下图所示: -
步骤12:添加标记点
将“机器人工具上”的坐标系进行隐藏,选中“CSYS8”,按住shitf键,接着选中“CSYS18”,进行全选,取消勾选全选的任意坐标系即隐藏掉。如下图所示:在“IROBOTCAM选项卡”栏,点击“机电建模”,在“机电建模”窗口下,点击“传感器与执行器”,点击“GSKRobot”,然后右键选择示教机器人,进行添加标记点。如下图所示:- 第一个点:
将第五关节的度数设为90度,点击回车键,机器人抓钩位置变化如图所示,然后点击“+”按钮标记。如下图所示: - 第二个点:
点击“指定点”,点击刚体上建立的坐标系,机器人会运动到此位置,然后点击“拖动示教”,点击机器人任意位置,出现动态坐标系,通过移动XYZ轴,将抓钩移动到合适位置,点击“+”按钮进行标记。如下图所示位置: - 第三、四个点:
在第二点位置不动,点击拖动示教,然后点击机器人任意位置,出现如图所示动态坐标系,沿着Z轴方向向上拖动不同位置,点击“+”按钮分别标记第三点和第四点。如图所示: - 第五个点:
点击“指定点”,点击另一个刚体上建立的坐标系,机器人会运动到此位置,然后点击“拖动示教”,点击机器人任意位置,出现动态坐标系,通过移动XYZ轴,将抓钩向上移动到与刚体快要分离的点,点击“+”按钮进行标记。如图所示: - 第六、七个点:
步骤和三四点建立方式一样,利用拖动示教。
所有点标记完毕,点击回零按钮,使机器人回到初始点。如下图所示:
- 第一个点:
-
步骤13:添加命令
在“IROBOTCAM选项卡”栏,点击“程序编辑”按钮。如图所示:在左侧窗口中右键点击“GSKController”,点击“添加JOB1”。然后点击已添加的“JOB1”,右键点击“添加程序”。如下图所示:在“program1”上右键点击编辑程序,出现程序参数的窗口。如下图所示:添加命令用到的所有指令位置及名称。其中WAIT(ms)的值“1000”,DOUT的False代表数字“0”,True代表数字“1”。如下图所示:更改所有用到“MOVL指令”下的参数值,原因:因为标记点之间距离较近,可以适当减小速度。如图所示:按照下列样式进行添加命令,将图中第七行的movj命令参数更改为“100,50,50”。如下图所示: -
步骤14:仿真验证
将所有坐标系进行隐藏即取消勾选,使界面更加整洁,将组件“WorkPiece_New_1_1”进行隐藏即取消勾选,使抓放更清晰。如图所示:在“IROBOTCAM选项卡”栏,点击“仿真按钮”。如图6-38所示:在“仿真”窗口下,可以勾选“开启视频录制”进行录制机器人的运动过程,点击“仿真控制”中的开始仿真按钮即开始视频录制,等待机器运行整个过程并且查看是否抓取成功,最后点击“仿真控制”中的结束仿真按钮即关闭视频录制。(视频录制位置在手册第三大板块有介绍到)如下图所示:
由此可见机器人的抓放操作设置成功。如下图所示: -
步骤15:命令报错
若点击开始仿真按钮,输出框提示以下错误,表示程序参数窗口下,第一个(行)命令发生错 误。典型错误类型:
- 指令下的参数的速度、加速度、加加速度过大或者过小。
- 出现了同一个点位,用了两种不同的命令。
4.7 碰撞检测
-
步骤1:打开文件
打开文件“碰撞检测.Z3”进入IROBOTCAM环境。如下图所示:
双击“KR210_R2700_extra装配”打开。如下图所示:
进入后组件详情界面。如下图所示:
-
步骤2:插入新建组件
首先将坐标系隐藏一下,使建模界面清楚分明。点击①处找到坐标系位置,然后按照②的步骤隐藏坐标系。如下图所示:在“KR210_R2700_extra”上右键点击插入新建组件,将零件命名为“COLLISION”,取消勾选自动激活,点击勾号完成创建。如下图所示:
将约束下坐标右键删除即约束也被删除,建立的组件“COLLISION”。如下图所示:
-
步骤3:插入和调整六面体
- 插入:
双击“COLLISION”组件,进入如下7-8所示,然后在“造型”一栏中找到六面体并且选择,在如图所示界面构建一个六面体,最后点击勾号。
- 调整:
构建完六面体双击“KR210_R2700_extra”装配,使其整体激活。如下图所示:
然后在“装配”一栏点击移动,点击图中的六面体,通过调整XYZ轴将其运动到合适位置。如下图所示:
- 插入:
-
步骤4:添加刚体
在“IROBOTCAM选项卡”中,点击“机电建模”,在“基本机电对象”上右键添加刚体。点击“+”按钮,选择图中建立六面体,质量为“1”,材料默认,响应碰撞勾选“支持感应”,点击确认,创建完成。(注意机器人组件刚体也要)如下图所示: -
步骤5:添加碰撞组
在“碰撞组”上右键添加碰撞组,将机器人的几个组件刚体选中通过“添加”按钮到右边的方框(或者通过shift键快速整体添加),将名称命名为“robot”。如下图所示:按上述步骤将六面体刚体也添加碰撞组,名称命名为“object”。如图所示:
-
步骤6:添加碰撞检测
在“IROBOTCAM选项卡”中,点击“碰撞检测”按钮。如下图所示:通过“Check和against”各自输出框下选择如图所示内容,然后点击“添加碰撞对象”,创建两个碰撞对,点击勾号创建完成。如下图所示: -
步骤7:添加标记点和命令
在“传感器与执行器”下,点击“ZZRobot”右键选择“示教机器人”。如图所示:点击“拖动示教”,然后点击机器人任意位置,拖动”X轴“,向下拉取到六面体下方,然后添加标记。如下图所示:接着拉去“X轴”,到六面体上方,添加标记点,使机器人添加完命令可以碰撞到六面体。
在“IROBOTCAM选项卡”中,点击“程序编辑”按钮。如下图所示:在”ZZController”右键添加“JOB1”,在“JOB1”上右键添加程序,在“program1”上右键添加程序,在运动命令上对“loc-1”和“loc-2”使用“MOVL命令”。如下图所示: -
步骤8:仿真验证
在“IROBOTCAM选项卡”中,点击“程序编辑”。如图所示:在程序编辑窗口,点击运行按钮。如下图所示:
点击程序编辑中的运行按钮,以高亮显示状态,即碰撞检测成功。如下图所示:
4.8 配置通信
-
步骤1:打开文件
打开文件“配置通信.Z3”进入IROBOTCAM环境。如下图所示:
等待模型导入,右边输出框下加红框位置会提示完成,本次利用的是应用案例六“机器人的抓与放”的操作完成版,也可根据此文件来查看案例六的抓放运动效果,组件界面详情。如下图所示:
-
步骤2:添加关节位置
在“IROBOTCAM选项卡”栏,点击“机电建模”按钮,点击“运行时行为”,点击“GSKRobot_EXEC”右键删除仿真序列。如下图所示:点击“传感器与执行器”,右键添加关节位置。如下图所示:点击“+”按钮,选择关节“S1”,将其命名为“S1Pos”,运动类型为“0”,速度为“0”,选择对象默认,点击确定。如图所示:按照上述操作依次将关节“S2、S3、S4、S5、S6”分别命名为“S2Pos、S3Pos、S4Pos、S5Pos、S6Pos”,运动类型都为“0”,速度都为“0”。完成后如下图所示:
-
步骤3:添加信号适配器
点击“信号适配器”,右键选择添加信号适配器,点击“+”按钮选择“S1Pos”,双击第二个方框填写“S1Pos_S”,第三个框数据类型选择“Float”,在第二栏点击右侧“+”按钮依次填写为“S1Pos_S、S1Pos_S*0.017444”(值来源3.14/180),将名称命名为“S1Pos_SD”。如下图所示:按照上述操作依次将关节位置“S2Pos、S3Pos、S4Pos、S5Pos、S6Pos”添加信号适配器。完成样式如下所示: -
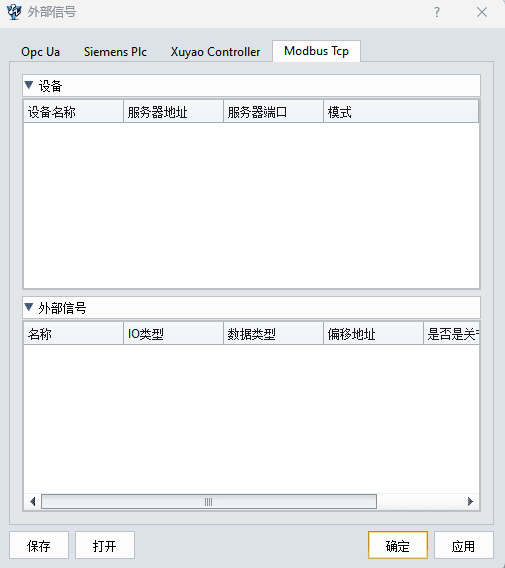
步骤4:添加通信模块
在“IROBOTCAM选项卡”中,点击“通信模块”按钮。如图所示:在“Modbus Tcp”下,在“设备”空白框处右键选择添加设备。如下图所示:在“Modbus Tcp设备框”下,将设备名称命名为“ModbusTcp1”,服务器地址为“192.168.1.10”,服务器端口为“502”,模式为“1”。点击确定。如下图所示:在“Modbus Tcp”下,在“外部信号”空白框处右键选择添加信号。如下图所示:在“DlgModbusTcpSignal框”下,将信号名称命名为“J1”,信号类型选择“Double”,IO类型选择“out”,是否是关节选择“是”,偏移地址为“65536”。点击添加。如下图所示:在“DlgModbusTcpSignal框”下,按照上述方法依次将其余信号名称命名为“J2、J3、J4、J5、J6”,信号类型都选择“Double”,IO类型选都择“out”,是否是关节都选择“是”,偏移地址依次改为“65540、65544、65548、65552、65556”(在原有基础上逐步加4),点击添加。如下图所示:接着添加抓放的通信,信号类型选择“Bool”,IO类型选都择“out”,是否是关节都选择“否”,偏移地址位“65560”。如图8-16所示:点击保存按钮可以将此次连接外部信号的信息保存到电脑上,便于下次直接打开文件导入就可以使用。如下图所示: -
步骤5:添加信号连接
在“机电建模”下,找到“信号连接”,右键添加信号连接。如下图所示:弹出如图所示框,将①信号连接名称命名为“SignalConnect1”,然后点击②最下角新建按钮,按照③所示在“信号连接框”下信号一栏点击左侧内部信号“S1Pos_S”然后点击右侧外部信号“J1”,最后点击连接按钮,将其余信号按照③的方式进行连接,最终如④所示。目的:这样就可以通过外部信号来控制内部信号使机器人进行抓与放的模拟操作。如下图所示: -
步骤6:仿真验证
在“IROBOTCAM”选项卡中,点击仿真按钮。如下所示:先点击“仿真控制”窗口最左侧的①开始仿真按钮,就会识别到②所添加的设备服务器,服务器上有③外部信号。如下图所示:
通过③添加的外部信号依次来控制④内部信号,④内部信号又操控着我们的⑤关节位置和仿真序列。最终完成一个外部通信功能。如下图所示:
4.9 转台模型
-
步骤1:打开文件
打开文件“转台.Z3”进入IROBOTCAM环境。如下图所示:
等待模型导入完成,打开界面详情组件。如下图所示:
-
步骤2:添加材料
在“IROBOTCAM选项卡”中,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“材料”,右键选择添加材料,打开“添加材料”窗口。如下图所示:
在“碰撞材料”窗口,摩擦系数为“1”,恢复系数为“0.5”,线性阻尼和角阻尼为“0”,名称命名为“Cailiao1”。如图下图所示:
在“碰撞材料”窗口,摩擦系数为“0.01”,恢复系数为“0.05”,线性阻尼和角阻尼为“0”,名称命名为“Cailiao2”。如图下图所示: -
步骤3:添加刚体
在“IROBOTCAM选项卡”中,点击“机电建模”选项。如下图所示:在“机电建模”窗口下,点击“基本机电对象”,右键选择“添加刚体”,打开“添加刚体”窗口。如下图所示:
在刚体窗口,点击“+”按钮进入对象选择状态,选择①“转盘SDD01_SLZP”创建刚体,如图9-11所示。质量为“1”,材料“默认”,响应碰撞“不勾选”。如下图所示:
按照上述操作参数,将如图所示其余7个位置组件进行创建刚体,创建完成界面详情。如下图所示:接着创建刚体“SDD01_DGJ_2_1”,点击“+”按钮,点击箭头所示位置组件“SDD01_DGJ_2_1”,质量为“0.001”,材料下拉选择“CaiLiao2”,响应碰撞勾选“物理属性”和“碰撞响应”,点击确认。如下图所示:然后创建刚体“SDD01_DGJ_3_1”,点击“+”按钮,点击高亮位置所示的组件“SDD01_DGJ_3_1”,质量为“0.001”,材料下拉选择“CaiLiao2”,响应碰撞勾选“物理属性”和“碰撞响应”,点击确认。如下图所示: -
步骤4:添加碰撞体
在“IROBOTCAM选项卡”中,点击“机电建模”选项。如下图所示:在“机电建模”窗口下,点击“基本机电对象”,右键选择“添加碰撞体”,打开“添加碰撞体”窗口。如下图所示:
在碰撞体窗口,点击“+”按钮进入对象选择状态,选择“转盘SDD01_SLZP”创建碰撞体,碰撞形状为“凸分解”,质量为“1”,响应碰撞勾选“碰撞响应”,碰撞材料为“Cailiao1”。(此过程凸分解要耐心等待)如下图所示:选择组件①“SDD01_DXZ”,添加碰撞体,碰撞形状为“凸包”,质量为“1”,响应碰撞勾选“碰撞响应”,碰撞材料“默认”。 添加组件②“SDD01_TLK”和组件③“SDD01_SLGD”位置组件分别进行创建碰撞体,碰撞形状为“凸分解”,质量为“1”,响应碰撞勾选“碰撞响应”,碰撞材料“默认”。 添加组件④“SDD01-02_LTDZ”和组件⑤“SDD01-02_LT”碰撞体,碰撞形状为“凸分解”,质量为“1”,响应碰撞勾选“碰撞响应”,碰撞材料“Cailiao2”,创建完成界面详情。如下图所示:(凸分解要较长时间,需耐心等待) -
步骤5:添加铰链副和滑动副
在“IROBOTCAM选项卡”中,点击“机电建模”选项。如图所示:在“机电建模”窗口下,点击“运动副和约束”,右键选择添加铰链副和滑动副。如图所示:
- 铰链副ZP_J1:
在“铰链副”窗口,点击“+”按钮选择子节点机电对象组件“转盘SDD01_SLZP”,父节点“默认不选”。指定矢量轴选择箭头所示“坐标系CSYS1”,起始角为“0”,限制的上限为“360”和下限为“-360”。运动类型下拉选择“被动”,名称命名为“ZP_J1”。如下图所示:
- 滑动副QG_J1:
在“滑动副”窗口,点击“+”按钮选择子节点机电对象组件“先选择①TLK组件再选择②SZQG_GJ组件”,父节点“默认不选”。指定矢量轴选择箭头所示“坐标系CSYS2”,偏置为“0”,限制的上限为“0.058”和下限为“0”。运动类型下拉选择“动力学”,名称命名为“QG_J1”。如下图所示:
- 铰链副ZP_J1:
-
步骤6:添加输出信号
在“IROBOTCAM选项卡”中,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“信号”,右键选择“添加信号”,打开“添加信号”窗口。如下图所示:
在“信号”窗口,添加“ZhuanPan”和“QiGang”的输出信号,IO类型都下拉选择“输出”,信号名称分别命名为“ZhuanPan_Out”和“QiGang_Out”,端口值都为“-1”,其余选项默认。如下图所示: -
步骤7:添加位置控制
在“IROBOTCAM选项卡”中,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“传感器与执行器”,右键选择“添加位置控制”,“打开“添加位置控制”窗口。如下图所示:
- ZhuanPan:
在“位置控制”窗口,点击“+”按钮选择机电对象“ZP_J1铰链副”,轴类型下拉选择“其他”,在“源于外部数据”下,目标为“90”,速度为“80”,在“限制加速度”下,最大加速度为“40”,勾选“限制加加速度”,最大加加速度为“110”,名称命名为“ZhuanPan”,选择对象为转盘输出信号“ZhuanPan_Out”,点击刚体,选择“转盘底座刚体组件DXZ”,再次点击刚体进行选中,基座标和法兰坐标都选“CSYS1”,其余选项默认。如下图所示:
- QiGang:
在“位置控制”窗口,点击“+”按钮选择机电对象“QG_J1滑动副”,轴类型下拉选择“气缸”,在“源于外部数据”下,目标为“0.058”,速度为“0.15”,在“限制加速度”下,最大加速度为“0.04”,勾选“限制加加速度”,最大加加速度为“0.01”,名称命名为“QiGang”,选择对象为转盘输出信号“QiGang_Out”,点击刚体,选刚体“长木板SLGD和SZQJ_DZ”,再次点击刚体进行选中,基座标和法兰坐标都选“CSYS2”,其余选项默认。如下图所示:
- ZhuanPan:
-
步骤8:添加信号适配器
在“IROBOTCAM选项卡”中,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“信号适配器”,上右键选择“添加信号适配器”,打开“添加信号适配器”窗口。如下图所示:
- ZhuanPan_SD:
在“信号适配器”窗口,点击“+”按钮,会出现指派为的下拉框,下拉选择“ZhuanPan”,名称命名为“ZhuanPan_S”,数据类型为“Float”,输入/输出为“IN”,初始值为“0”,在公式一栏,都填写“ZhuanPan_S”,名称命名为“ZhuanPan_SD”。如下图所示:
- QiGang_SD:
在“信号适配器”窗口,点击“+”按钮,会出现指派为的下拉框,下拉选择“QiGang”,名称命名为“QiGang_S”,数据类型为“Float”,输入/输出为“IN”,初始值为“0”,在公式一栏,都填写“QiGang_S”,名称命名为“QiGang_SD”。如下图所示:
- ZhuanPan_SD:
-
步骤9:添加信号
在“IROBOTCAM选项卡”中,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“信号”,右键选择“添加信号”,打开“添加信号”窗口。如下图所示:
在“信号”窗口,添加“ZhuanPan”的输入信号,IO类型都下拉选择“输入”,信号名称命名为“ZhuanPan_In1”端口值都为“-1”,其余选项默认。如下图所示:按照上述方法,将“ZhuanPan”和“QiGang”的其余输入信号,添加完成详情界面。如下图所示: -
步骤10:添加仿真序列
在“IROBOTCAM选项卡”中,点击“机电建模”按钮。如下图所示:在“机电建模”窗口下,点击“运行时行为”,右键选择“添加仿真序列”,打开“添加仿真序列”窗口。如下图所示:
- ZhuanPan_EXEC1:
在“仿真序列”窗口,点击“+”按钮选择“ZhuanPan位置控制”,开始时间为“0”,持续时间为“5”,激活信号为“ZhuanPan_In1”,激活条件为“True”,结束信号为“QiGang_In1”,执行信号为“ZhuanPan_S”,目标值为“90”,名称命名为“ZhuanPan_EXEC1”。如下图所示:
- QiGang_EXEC1:
在“仿真序列”窗口,点击“+”按钮选择“QiGang位置控制”,开始时间为“0”,持续时间为“5”,取消勾选激活信号,结束信号为“ZhuanPan_In1”,执行信号为“QiGang_S”,目标值为“0.058”,名称命名为“QiGang_EXEC1”。如下图所示:
- QiGang_EXEC2:
在“仿真序列”窗口,点击“+”按钮选择“QiGang位置控制”,开始时间为“0”,持续时间为“5”,激活信号为“QiGang_In1”,激活条件为“True”结束信号为“ZhuanPan_In2”,执行信号为“QiGang_S”,目标值为“0.058”,名称命名为“QiGang_EXEC2”。如下图所示:
- ZhuanPan_EXEC1:
-
步骤11:取消物理属性
点击“SDD01_SLZP_part碰撞体”,鼠标右键查看碰撞体属性,取消勾选“物理属性”,点击确定。如下图所示: -
步骤12:仿真验证
在“IROBOTCAM选项卡”中,点击“仿真按钮”按钮。如下图所示:在“仿真”窗口,点击开始仿真按钮即转台开始运转。如下图所示:
转台仿真验证最后显示状态即为成功。(仿真验证时,等转台运行完再点击结束仿真)如下图所示: